Author: Denis Avetisyan
A project-based approach comparing PID and fuzzy logic controllers challenges students to move beyond rote implementation and develop higher-order analytical skills.
This review details a course project designed to stimulate analysis, synthesis, and evaluation within mechatronics education through comparative control system design.
While active learning is widely adopted in engineering education, fostering genuinely higher-order thinking skills-analysis, synthesis, and evaluation-remains a persistent challenge. This paper details an approach implemented in a semester-long mechatronics course, as described in ‘Stimulating Higher Order Thinking in Mechatronics by Comparing PID and Fuzzy Control’, where students comparatively evaluate proportional-integral-derivative (PID) and fuzzy control methodologies for a leader-follower robotic system, without prescribed solutions or evaluation criteria. Results indicate that this open-ended project encourages students to develop creative performance metrics and demonstrates the complexities inherent in comparative control studies. How might such project-based learning strategies be scaled and adapted to cultivate these critical thinking skills across diverse engineering disciplines?
The Inevitable Drift: Foundations of Control and Interdisciplinary Design
The functionality of both robotics and mechatronics systems is fundamentally reliant on control theory principles, which provide the mathematical framework for designing systems that respond predictably and accurately to desired inputs. This discipline addresses how to maintain or alter the behavior of a system – whether it’s stabilizing an inverted pendulum, guiding a robotic arm, or regulating the temperature of a complex machine – through feedback mechanisms. Core concepts such as system modeling, stability analysis – often utilizing tools like the Bode plot and Nyquist criterion – and controller design are crucial for ensuring reliable and precise operation. Without a strong grasp of these foundational elements, even the most sophisticated mechanical designs and electronic components will fail to achieve their intended purpose, highlighting control theory as the intellectual core of successful robotic and mechatronic engineering.
The complexities of modern engineering systems demand a shift away from siloed disciplinary learning. Contemporary challenges – be it designing adaptive prosthetics, developing autonomous vehicles, or building sustainable infrastructure – rarely conform to the boundaries of traditional engineering fields. Consequently, effective solutions increasingly arise from the convergence of knowledge; mechanical engineers collaborate with computer scientists, electrical engineers work alongside materials scientists, and biological insights inform robotic designs. This necessitates an interdisciplinary approach to engineering education, where curricula are structured to foster collaboration, cross-pollination of ideas, and a holistic understanding of system interactions – preparing engineers not just to master a specific domain, but to integrate diverse expertise for innovative problem-solving.
Contemporary engineering education is increasingly focused on bridging the gap between abstract theory and concrete implementation. Students are no longer adequately prepared by solely mastering fundamental principles; a robust curriculum now necessitates hands-on experiences, project-based learning, and opportunities to apply theoretical knowledge to realistic challenges. This shift acknowledges that complex real-world problems rarely present themselves as idealized textbook scenarios, demanding adaptability and innovative problem-solving skills. By integrating practical application, modern curricula aim to cultivate engineers capable of not only understanding how things work, but also how to design, build, and troubleshoot systems effectively – ultimately fostering a generation equipped to tackle the evolving demands of industry and society.
The Illusion of Mastery: Cultivating Cognitive Skills Through Project-Based Learning
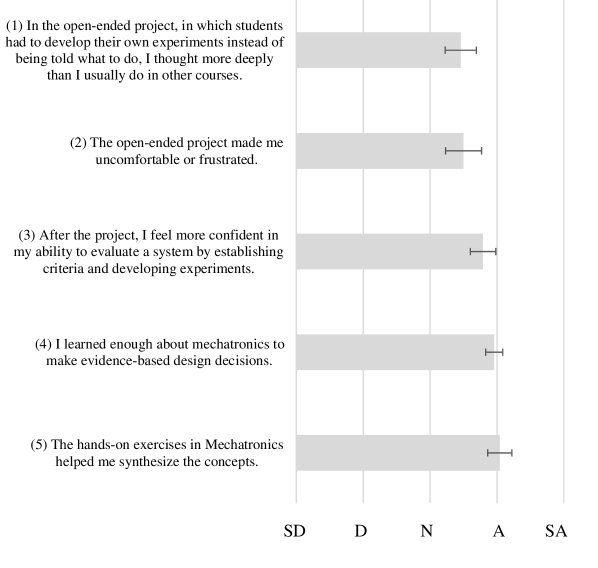
Project-based learning facilitates the development of higher-order thinking skills by requiring students to engage in complex, real-world tasks. Unlike rote memorization, project work necessitates the application of analytical skills to deconstruct problems, evaluate potential solutions, and synthesize information from multiple sources. Students routinely assess the validity of data, identify biases, and formulate reasoned judgments throughout the project lifecycle. Data collected from recent implementations indicate a positive correlation between student participation in project-based learning and self-reported gains in analysis, synthesis, and evaluation capabilities, with average Likert scores ranging from ‘Neutral’ to ‘Agree’ on related skill assessments.
Bloom’s Taxonomy provides a hierarchical framework for structuring project-based learning activities to systematically develop cognitive skills. The taxonomy, comprised of levels ranging from Remembering and Understanding, through Applying, Analyzing, Evaluating, and ultimately Creating, allows educators to design projects with increasing complexity. Initial project phases can focus on lower-order thinking skills – recall and comprehension – while subsequent stages demand higher-order skills such as critical analysis, problem-solving, and the synthesis of new ideas. By aligning project tasks with specific taxonomy levels, instructors can ensure students are progressively challenged and build a strong foundation of cognitive abilities, moving from basic knowledge acquisition to complex, creative application.
Successful project-based learning necessitates a structured approach to implementation, beginning with careful experimental design that clearly defines learning objectives, assessment criteria, and project scope. Regular in-progress reviews are critical for monitoring student progress against these objectives; these reviews should include formative feedback focused on specific areas for improvement, addressing both conceptual understanding and practical application of skills. Data collected from student perceptions of these reviews indicated an average response between ‘Neutral’ and ‘Agree’, suggesting students generally find these check-ins valuable for staying on track and receiving guidance. The purpose of these reviews extends beyond simple progress tracking to actively guide students through challenges and ensure alignment with desired learning outcomes, thereby maximizing the development of higher-order thinking skills.
Student evaluations indicated a generally positive reception of in-progress review briefings, with average agreement scores ranging between ‘Neutral’ and ‘Agree’. This suggests the briefings were perceived as useful for maintaining student engagement and adherence to project timelines. Concurrent Likert scale assessments revealed similar average scores between ‘Neutral’ and ‘Agree’ on statements designed to measure perceived improvements in analysis, synthesis, and evaluation skills. These findings collectively suggest students believed the project-based learning approach, supported by regular reviews, was effective in developing higher-order cognitive abilities.
Self-directed learning within project-based learning environments emphasizes student autonomy and responsibility for their educational process. This approach shifts the focus from teacher-led instruction to student-initiated inquiry, requiring learners to define their own learning goals, select appropriate resources, and monitor their progress. Implementation typically involves students making choices regarding project scope, methodology, and presentation format, fostering intrinsic motivation and developing skills in time management, problem-solving, and independent thought. The resulting sense of ownership encourages deeper engagement with the material and promotes the development of lifelong learning habits.
The Promise of Physicality: Mobile Robotics as a Platform for Control Systems Exploration
Mobile robotics offers a uniquely effective environment for control systems education due to the inherent integration of theoretical concepts with physical realization. Unlike simulations or purely mathematical exercises, students working with mobile robots directly observe the effects of control algorithm parameters on a physical system, facilitating a deeper understanding of concepts such as feedback loops, system dynamics, and stability. This hands-on approach allows for iterative design, testing, and refinement of control strategies in a real-world context, addressing challenges not always apparent in abstract models. The platform encourages active learning through experimentation and provides immediate visual and quantifiable results, reinforcing the connection between theory and practice and enhancing student engagement.
Students utilizing a mobile robotics platform can gain practical experience with multiple control methodologies. Proportional-Integral-Derivative (PID) control allows for precise adjustments based on error signals, enabling trajectory tracking and stabilization. Discrete control, implemented through state machines and conditional logic, facilitates event-driven responses and sequential behaviors. Fuzzy control introduces the capability to handle imprecise or uncertain inputs by utilizing linguistic variables and membership functions to determine appropriate actions. Implementation of these strategies allows students to observe the trade-offs between complexity, responsiveness, and accuracy when applied to a physical system, and to tailor control approaches to specific robotic tasks.
Effective mobile robot control necessitates the implementation of several core techniques. Trajectory tracking involves designing controllers that minimize the error between the robot’s actual path and a pre-defined desired path, often employing feedback mechanisms. Step response analysis, evaluating the robot’s reaction to a sudden change in input, is critical for characterizing system dynamics and tuning controller parameters to achieve desired stability and performance. Finally, event-driven programming allows the robot to react immediately to sensor inputs or external stimuli, enabling responsive behavior and real-time control; this is typically achieved through interrupt routines or callback functions that execute specific actions when predefined events occur, bypassing the need for continuous polling.
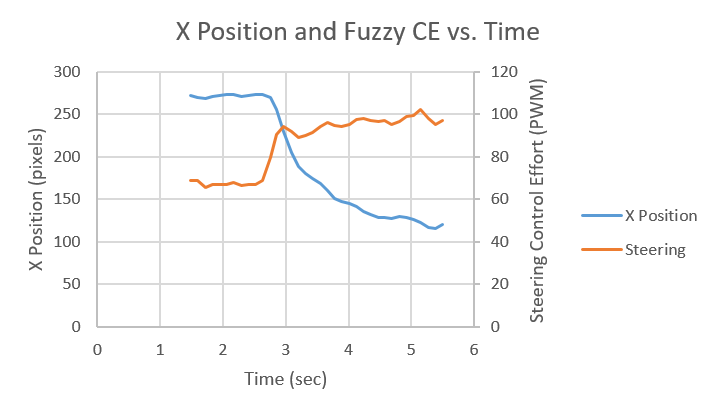
Effective control system design relies heavily on data logging and subsequent analysis; quantifiable metrics are essential for assessing performance and iteratively improving algorithms. Data logs should capture relevant state variables – including motor encoder readings, inertial measurement unit data, and sensor inputs – at a sufficiently high frequency to accurately represent system dynamics. Analysis techniques include time-domain plots of system response to step inputs or trajectory tracking attempts, frequency-domain analysis using tools like the Fast Fourier Transform, and statistical evaluation of error signals. Key performance indicators such as rise time, settling time, overshoot, and steady-state error should be calculated and compared against design specifications. The collected data facilitates the identification of control system deficiencies, enabling parameter tuning and algorithm refinement to achieve desired behaviors and robustness.
The Inevitable Emergence: Autonomous Formation Control and Advanced Robotics
Autonomous formation control represents a significant advancement in multi-robot systems, allowing a collection of robots to move and operate in a coordinated manner, maintaining pre-defined geometric patterns without the need for a central controller or constant external input. This capability stems from distributed algorithms where each robot utilizes local sensing and communication to determine its position relative to its neighbors and adjusts its movements accordingly, effectively creating a self-organizing system. Such decentralized control offers increased robustness against individual robot failures and scalability for larger formations, as the system doesn’t rely on a single point of failure or overwhelming computational burden on one unit. Applications range from precision agriculture and environmental monitoring, where robots might collaboratively map a field or track pollution plumes, to search and rescue operations and even coordinated space exploration, demonstrating the broad potential of this field to tackle complex tasks with greater efficiency and adaptability.
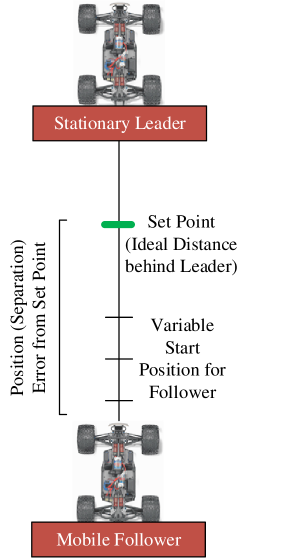
Robotic systems often achieve coordinated movement through leader-follower configurations, a surprisingly robust and easily implemented formation control strategy. In this approach, one robot – the leader – navigates a desired path, while subsequent robots – the followers – maintain a predetermined spatial relationship with it. This doesn’t necessitate complex, centralized computation; instead, followers typically rely on local sensing and communication to track the leader’s position and adjust their own movements accordingly. The elegance of this method lies in its scalability; adding or removing followers doesn’t fundamentally alter the control logic, making it suitable for diverse applications ranging from multi-robot exploration to coordinated manufacturing and even artistic swarm displays. While more sophisticated algorithms exist, the leader-follower paradigm provides a foundational and practical starting point for understanding and deploying complex robotic formations.
The accessibility of platforms like Arduino has revolutionized the field of robotic control, dramatically lowering the barrier to entry for both researchers and students. These embedded systems provide a cost-effective and versatile foundation for prototyping and implementing complex control algorithms, enabling rapid iteration and experimentation with robotic formations. Beyond Arduino, other embedded systems offer varying levels of processing power and connectivity, allowing for scalable deployments ranging from small-scale laboratory demonstrations to larger, more sophisticated robotic swarms. This hands-on approach fosters a deeper understanding of control theory and practical engineering challenges, as developers directly interface with the hardware and software components responsible for coordinating robotic movements and maintaining desired formations.
The integration of theoretical foundations with hands-on practice in robotic systems is increasingly vital for cultivating the next generation of automation specialists. Students engaged in both the design of control algorithms and their subsequent implementation on platforms like Arduino gain a uniquely comprehensive skillset. This blended approach not only solidifies understanding of core concepts – such as formation control and embedded systems – but also fosters the problem-solving abilities essential for tackling the complex challenges inherent in contemporary robotics research. Consequently, graduates are well-positioned to contribute meaningfully to cutting-edge developments in areas like autonomous vehicles, collaborative robotics, and advanced manufacturing, driving innovation and shaping the future of automation technologies.

The pursuit of comparative control strategies, as detailed in this work, reveals a curious truth about systems. Each approach-PID or fuzzy logic-represents a commitment, a dependency forged with past understanding. This echoes Marvin Minsky’s observation: “The more we learn, the more we realize the magic of things we don’t know.” The students, tasked with analyzing and synthesizing these different methods, aren’t simply building a controller; they’re cultivating an ecosystem of understanding. The inherent limitations of each method inevitably surface, demonstrating that every architectural choice carries within it the prophecy of future challenges, demanding iterative refinement. Control, as it were, proves itself an illusion demanding constant SLAs – service level agreements with reality itself.
What Shadows Remain?
The exercise, as described, isn’t a demonstration of mastery-it’s a carefully constructed failure mode. Students compare controllers, but the true comparison isn’t between PID and fuzzy logic. It’s between the illusion of control-a neat, numerical solution-and the messy, irreducible complexity of any real system. The project’s success isn’t measured in performance metrics, but in the lingering questions: which assumptions broke first? What unanticipated behaviors emerged? These are the confessions logged by a system observing itself.
The temptation will be to refine the project, to create tighter constraints, to demand more predictable outcomes. This is a fallacy. Each imposed certainty is a prophecy of a more interesting, more subtle failure. The next step isn’t better evaluation rubrics, but a deliberate loosening of the boundaries. Allow the students to introduce entirely new control schemes, to embrace the unknown. Let the system plot its own course, and then observe, with detached curiosity, where it leads.
The work hints at a broader truth: education isn’t about filling a vessel, but about cultivating a garden of potential failures. The truly valuable skills aren’t those that prevent errors, but those that allow one to diagnose them, to trace their roots back to the fundamental assumptions that underpin the entire endeavor. When the system is silent, it is not at rest-it is merely gathering strength for its next revelation.
Original article: https://arxiv.org/pdf/2601.08865.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Clash Royale Best Boss Bandit Champion decks
- Vampire’s Fall 2 redeem codes and how to use them (June 2025)
- World Eternal Online promo codes and how to use them (September 2025)
- How to find the Roaming Oak Tree in Heartopia
- Mobile Legends January 2026 Leaks: Upcoming new skins, heroes, events and more
- Best Arena 9 Decks in Clast Royale
- ATHENA: Blood Twins Hero Tier List
- Clash Royale Furnace Evolution best decks guide
- Brawl Stars December 2025 Brawl Talk: Two New Brawlers, Buffie, Vault, New Skins, Game Modes, and more
- How To Watch Tell Me Lies Season 3 Online And Stream The Hit Hulu Drama From Anywhere
2026-01-16 04:14