Author: Denis Avetisyan
Researchers are turning to the natural world, specifically plant life, to design robots that are more intuitive, expressive, and seamlessly integrated into our daily lives.
This review explores the application of plant-inspired design metaphors for creating ambient and expressive robots, focusing on research through design and prototyping considerations for Human-Robot Interaction.
While much human-robot interaction (HRI) prioritizes explicit engagement through anthropomorphic or zoomorphic designs, this work-Plant-Inspired Robot Design Metaphors for Ambient HRI-explores an alternative paradigm inspired by the subtle, temporally-rich presence of plants. Through a Research through Design methodology and a suite of open-source prototypes, we demonstrate how plant-based metaphors can inform the creation of robots that offer a more ambient and expressive form of interaction. By investigating perceptions of these plant-inspired forms, we offer design considerations for reshaping HRI-but how might fully embracing biomimicry redefine our relationships with artificial intelligence?
Beyond Mimicry: Embracing Botanical Principles in Robotics
Conventional robotics frequently prioritizes the imitation of human biomechanics, a strategy that inadvertently limits innovation and efficiency. This anthropocentric approach often overlooks the diverse and refined movement strategies already perfected by the natural world, particularly within the plant kingdom. While human motion serves as an intuitive starting point, it can impose constraints on robotic design, hindering the development of solutions optimized for specific tasks or environments. The focus on mimicking human actions neglects the potential for robots to adopt fundamentally different, and potentially superior, methods of locomotion, manipulation, and interaction – methods observable in the elegant simplicity and resourcefulness of plant life, which thrives through adaptations distinct from animal movement.
Robotics traditionally prioritizes replicating human or animal movements, often overlooking the elegant solutions already honed by the plant kingdom. Plant morphology – the way plants are shaped and structured – presents a radically different design space, eschewing rigid skeletons for flexible, distributed systems. Crucially, plants operate on temporal rhythms vastly different from our own, exhibiting slow, continuous growth and responses to stimuli. This inspires a shift in robotic design, moving beyond purely functional objectives – such as speed or strength – toward robots that prioritize adaptability, resilience, and energy efficiency. By drawing inspiration from these biological principles, engineers are beginning to envision robots that don’t simply perform tasks, but rather integrate into environments, responding to subtle changes and exhibiting behaviors more akin to living organisms.
Robotic designs inspired by plant life are increasingly focused on achieving environmental harmony and simplifying human-robot interaction. Rather than striving for complex, human-like movements, these robots prioritize adaptability and natural integration, mirroring how plants respond to and coexist within their surroundings. This bio-inspired approach manifests in designs that emphasize gentle, flowing motions, flexible structures, and responsiveness to subtle environmental cues – qualities that facilitate safer operation in human spaces and more intuitive communication. The resulting robots aren’t intended to perform like humans, but to relate to their surroundings – and to us – in a more natural and predictable manner, potentially revolutionizing fields from collaborative manufacturing to assistive care.
Plant-inspired robotics diverges sharply from the traditional pursuit of biomimicry focused on replicating animal forms and movements; instead, it centers on abstracting fundamental principles observed in plant life to generate entirely new robotic capabilities. Researchers aren’t attempting to build robotic trees or flowers, but rather to understand how plants achieve resilience, adaptability, and efficient resource utilization – principles like auxinic growth, phototropism, and thigmotropism – and translate those mechanisms into robotic designs. This approach prioritizes functional innovation over aesthetic similarity, potentially leading to robots capable of navigating complex terrains with greater stability, self-repairing structures inspired by plant growth, or even energy harvesting systems modeled after photosynthetic processes. The focus, therefore, is not on imitation, but on leveraging the unique strategies developed through millions of years of plant evolution to overcome limitations in conventional robotics and unlock unprecedented behaviors.
Prototyping Plant Behaviors Through Research by Design
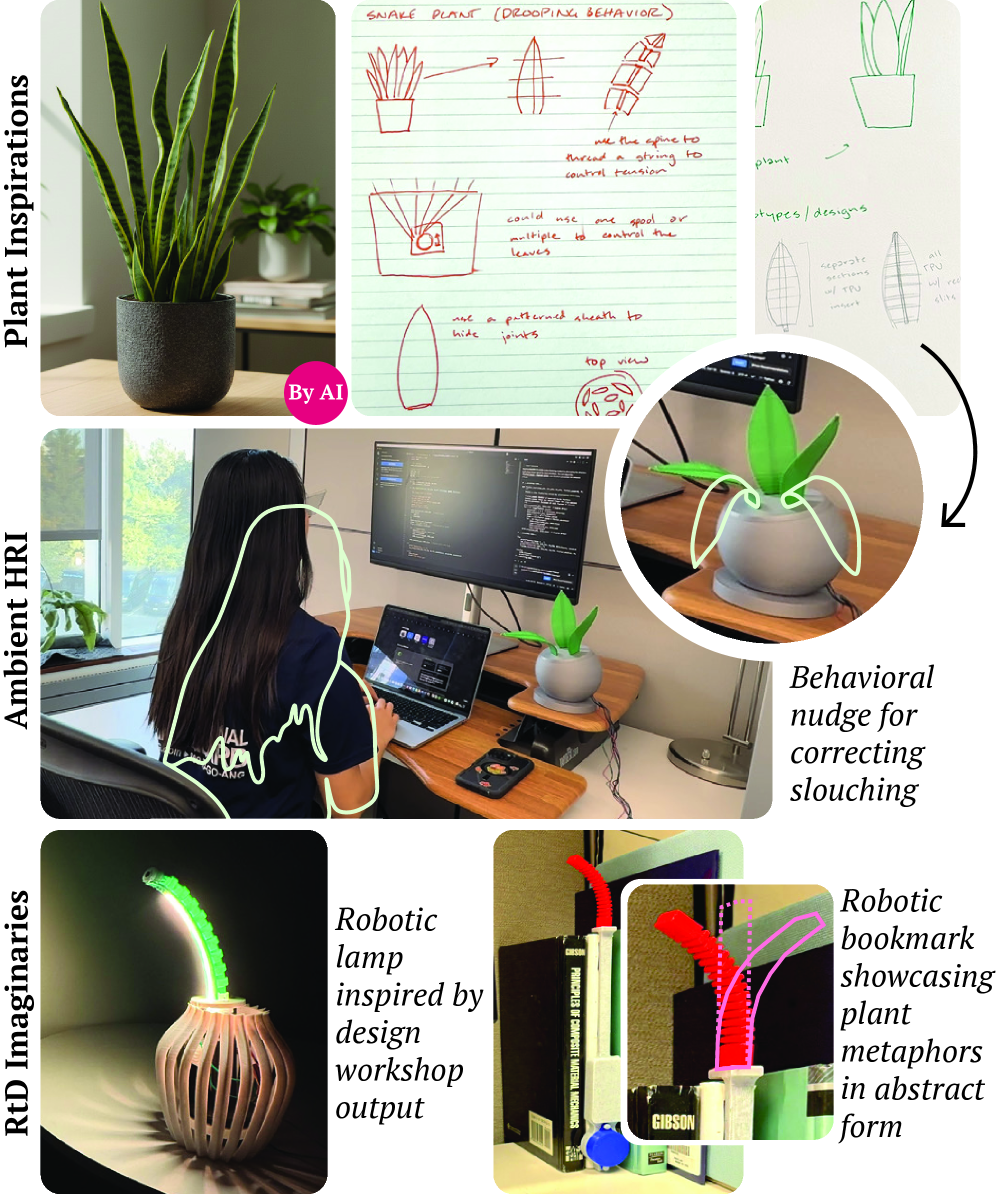
A Research Through Design methodology was employed, resulting in the construction of four robotic prototypes modeled after specific plant species: the snake plant (Sansevieria trifasciata), a generic flowering plant, the Venus flytrap (Dionaea muscipula), and a mobile pot system. Each prototype served as a physical investigation into distinct aspects of plant behavior, translating observed botanical characteristics into robotic form and function. The selection of these particular plants was deliberate, representing a range of motion types – from the slow, steady growth of the snake plant and flowering plant, to the rapid, triggered response of the Venus flytrap, and the ambulatory potential demonstrated by mobile plant species. This iterative prototyping process allowed for direct engagement with the challenges of embodying plant-like behaviors in a robotic system.
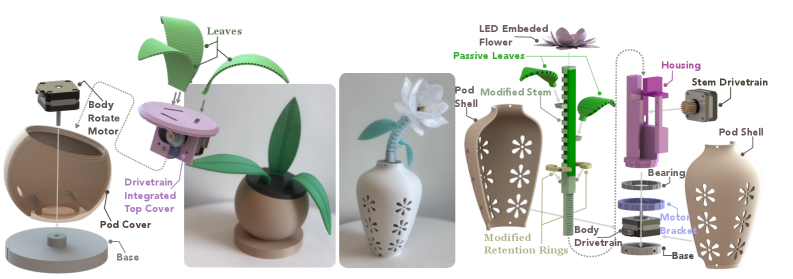
The robotic prototypes were designed to physically manifest specific plant behaviors. The snake plant prototype focused on slow, swaying motions achieved through basal rotation. The flowering plant prototype investigated dynamic growth, employing a telescoping mechanism to simulate the extension of a stem and the unfolding of petals. The Venus flytrap prototype utilized a responsive enclosure, triggered by tactile sensors to mimic leaf closure upon contact. Finally, the mobile pot prototype demonstrated subtle leaf movements via individually actuated leaflets, exploring nuanced responses to environmental stimuli.
Material selection was a primary factor in realizing the robotic prototypes, directly impacting both their visual representation and operational capabilities. For example, flexible polymers were utilized to mimic the natural sway of a snake plant, while the Venus flytrap prototype incorporated materials with a rapid response to stimuli to simulate trap closure. The aesthetic quality of each prototype was also heavily influenced by material choices; the flowering plant utilized translucent silicone to diffuse internal lighting and replicate petal luminescence. Beyond appearance, material properties – including weight, elasticity, and responsiveness – dictated the achievable range of motion and the precision with which plant behaviors could be replicated in robotic form.
To facilitate the observed plant behaviors, custom actuation systems were integrated into each robotic prototype. The snake plant robot utilized a series of servo motors controlling segmented body sections to replicate swaying and directional growth. The flowering plant prototype employed a pneumatic system to extend and retract a central “bloom,” simulating dynamic growth and responsiveness to stimuli. The Venus flytrap robot incorporated a bistable pneumatic system for rapid leaf closure, triggered by proximity sensors. Finally, the mobile pot prototype utilized a differential drive system for locomotion combined with small servo-controlled “leaves” to express subtle movements and orientational changes.
Evaluating User Experience and Expressive Presence
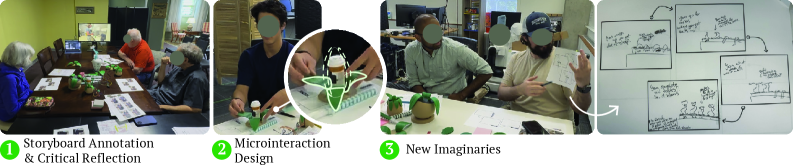
Design workshops were implemented as a primary method for evaluating user perceptions of the developed robotic prototypes, specifically focusing on qualities of expressiveness. These workshops utilized a combination of observation and direct participant feedback to assess how users interpreted the robots’ physical characteristics and behaviors. Data collection involved qualitative analysis of participant responses to structured scenarios and open-ended questions regarding their emotional responses and perceived social cues exhibited by the robots. The workshops aimed to identify specific design elements contributing to positive or negative user perceptions, informing iterative improvements to the robots’ aesthetic and behavioral profiles. Findings from these sessions provided critical insights into the relationship between robotic form, behavior, and the creation of a positive user experience.
User testing indicated a strong positive correlation between the robots’ deliberately subdued kinetic behaviors and perceived social acceptance. Participants consistently reported feeling more comfortable and less threatened by robots exhibiting minimal, unprompted movement and a lack of overt responsiveness. This preference for non-reactive behaviors suggests that minimizing the perception of agency – and therefore potential for unpredictable action – is a key factor in promoting approachability and reducing user anxiety when interacting with robotic systems. Data collected from design workshops demonstrated that subtle movements were interpreted as indicators of ‘life’ without triggering a defensive response, fostering a more relaxed interaction dynamic.
Robot scale and Ambient Presence were key factors in establishing a calming effect and facilitating environmental integration during user testing. Specifically, the robots’ physical dimensions were designed to be non-threatening and blend with typical domestic spaces, avoiding dominance or obstruction. Ambient Presence, achieved through subtle movements and a lack of overtly reactive behaviors, allowed the robots to occupy space without demanding immediate attention or interaction. This passive occupation fostered a sense of normalcy and reduced user anxiety, contributing to a perception of the robots as integrated elements within the environment rather than intrusive devices.
Research indicates plant-inspired robots facilitate more natural human-robot interaction (HRI) through an emphasis on presence rather than explicit task execution. Data from design workshops demonstrated participant preference for robots exhibiting subtle movements and non-reactive behaviors, contributing to perceptions of approachability and reduced intimidation. This suggests a design approach prioritizing a calming ambient presence – achieved through scale and nuanced behavior – can yield more intuitive HRI experiences compared to designs focused on direct action and task completion. The observed positive responses support the hypothesis that mirroring plant-like characteristics fosters a more comfortable and integrated interaction dynamic between humans and robotic entities.

Envisioning a Future Shaped by Biomimetic Robotics
Robotic design is undergoing a shift, moving beyond purely utilitarian forms to embrace aesthetics and emotional resonance through biomimicry. Researchers are demonstrating that inspiration from the natural world yields robots that are not simply functional tools, but objects capable of eliciting positive emotional responses in humans. This approach prioritizes organic shapes, natural materials, and movement patterns observed in living organisms – from the graceful undulation of marine life to the subtle growth patterns of plants. The result is a new generation of robots intended to integrate seamlessly into human environments, fostering a sense of connection and trust rather than eliciting discomfort or fear. This focus on aesthetic and emotional intelligence promises a future where robots are perceived not as cold machines, but as companions and collaborators.
Conventional robotics often prioritizes mimicking human movements and responses, striving for anthropomorphic designs intended to seamlessly integrate into human spaces. However, a shift towards biomimicry encourages exploration beyond this established paradigm. Researchers are now investigating a broader spectrum of natural forms and behaviors – from the fluid motion of marine life to the growth patterns of plants – as inspiration for robotic design. This divergence allows for the creation of robots uniquely suited to specific tasks, potentially exceeding human capabilities in those areas, and also fosters entirely new interaction paradigms. The result isn’t simply a different kind of robot, but a reimagining of what a robot can be – one that prioritizes efficiency, adaptability, and novel functionalities over strict human replication.
Robotic designs increasingly leverage the understated elegance of the plant kingdom to cultivate more harmonious human-machine interactions. Research indicates that mirroring botanical rhythms – the slow unfolding of leaves, the gentle sway of stems – can significantly reduce the stress often associated with highly efficient, yet abrupt, automated systems. This biomimetic approach extends beyond mere aesthetics; subtle, plant-like “gestures” in a robot’s movements or lighting patterns are shown to evoke feelings of tranquility and connection, promoting a sense of calm in environments saturated with technology. By prioritizing gradual transitions and interpretive responses over rapid, precise actions, designers are creating robots that feel less like tools and more like peaceful cohabitants, fostering a more positive and intuitive user experience.
Recent investigations have yielded a defined framework of design principles geared towards fostering more harmonious human-robot interactions. This framework prioritizes ambient qualities – robots that exist as subtle background presences rather than demanding attention – and advocates for gradual movements and responses mirroring natural processes. Crucially, the research stresses the importance of interpretive interactions, where robotic behavior isn’t rigidly programmed but adapts to nuanced human cues and contexts. These considerations move beyond purely functional design, suggesting that successful robotic integration into daily life hinges on creating machines that are responsive, aesthetically considerate, and capable of building rapport through subtle, ecologically valid behaviors.
The exploration of plant-inspired robotics, as detailed in this research, seeks to move beyond the limitations of purely mechanistic or anthropomorphic designs. This pursuit echoes Alan Turing’s sentiment: “Sometimes people who are unskilful critics of computers like to point out that computers cannot do everything. But this is not a point against computers; it is a point against the critics.” The article champions a shift in perspective, suggesting that inspiration needn’t be limited to human forms. Just as Turing challenged conventional thinking about machine capabilities, this work challenges designers to look beyond established robotic aesthetics, embracing the subtle expressiveness and ambient integration offered by natural systems. Good architecture is invisible until it breaks, and only then is the true cost of decisions visible.
Cultivating the Future
The pursuit of plant-inspired robotics, as demonstrated by this work, reveals a subtle irony. The ambition isn’t merely to mimic biological forms, but to understand the principles by which plants achieve robust, adaptive interaction with their environments. Documentation captures structure, but behavior emerges through interaction; a crucial distinction often overlooked in robotics. Current approaches tend to focus on replicating superficial aesthetics, rather than the underlying logic of growth, tropism, and distributed sensing. The next phase requires a shift in emphasis-from ‘what does it look like?’ to ‘how does it become?’
A significant limitation remains the translation of organic adaptability into engineered systems. Plants thrive on redundancy and graceful degradation; robots, conversely, are often brittle and reliant on precise calibration. Future research must address this fundamental mismatch, exploring materials and control architectures that prioritize resilience over rigid performance. The field needs to move beyond isolated prototypes and consider the systemic implications of ambient robotic agents-how do these systems coexist, compete, and collaborate within complex human environments?
Ultimately, the success of this endeavor will not be measured by the creation of ‘lifelike’ robots, but by the development of systems that genuinely enhance human experience. It is a question of integration, not imitation. The goal should be to create robotic ‘flora’ that quietly, unobtrusively, and effectively support human activity – a subtle, pervasive presence, rather than a conspicuous performance.
Original article: https://arxiv.org/pdf/2601.22387.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- ‘Project Hail Mary’s Unexpected Post-Credits Scene Is Worth Sticking Around
- Total Football free codes and how to redeem them (March 2026)
- Limbus Company 2026 Roadmap Revealed
- The Division Resurgence Specializations Guide: Best Specialization for Beginners
- After THAT A Woman of Substance cliffhanger, here’s what will happen in a second season
- Brawl Stars Sands of Time Brawl Pass brings Sandstalker Lily and Sultan Cordelius sets, along with chromas and more
- Brawl Stars Brawl Cup Pro Pass arrives with the Dragon Crow skin and Chroma, unique cosmetics, and more rewards
- Clash of Clans April 2026 Gold Pass Season introduces a Archer Queen skin
- XO, Kitty season 3 soundtrack: The songs you may recognise from the Netflix show
- Gold Rate Forecast
2026-02-02 08:06