Author: Denis Avetisyan
New research explores how socially intelligent robots can provide personalized guidance and emotional support to help individuals confidently navigate job interviews.
An adaptive robotic interview coach demonstrates the effectiveness of person-centered scaffolding in reducing anxiety and improving user engagement.
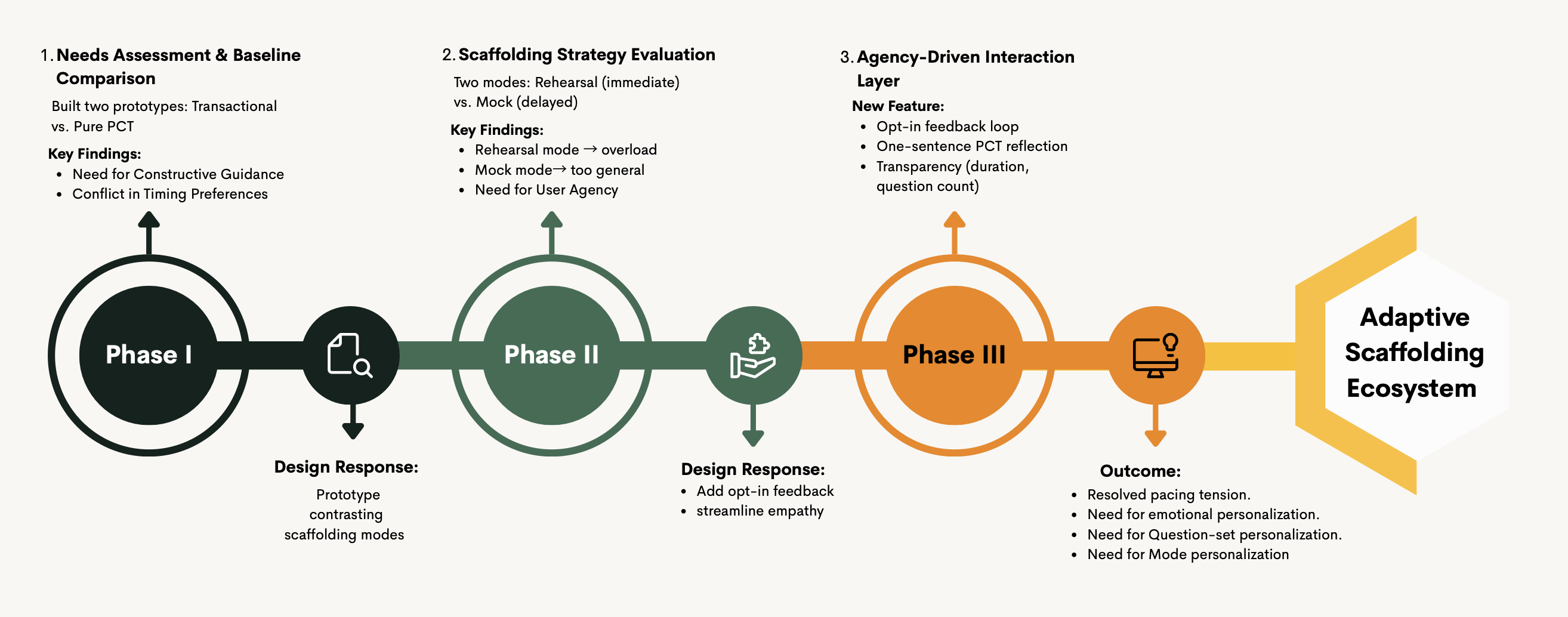
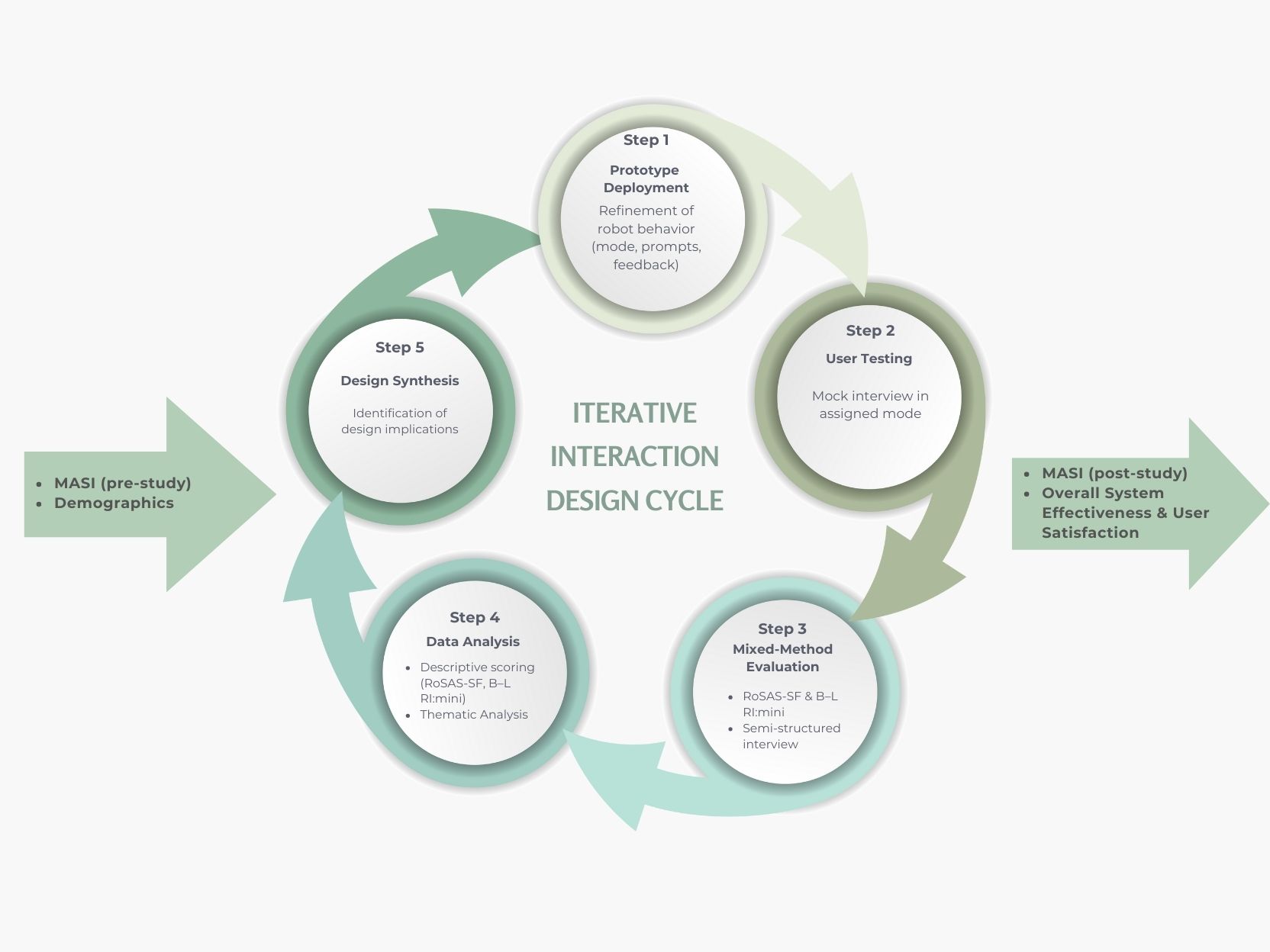
Balancing empathetic support with effective instruction remains a key challenge in automated coaching systems. This is addressed in ‘Tackling the Scaffolding Paradox: A Person-Centered Adaptive Robotic Interview Coach’, which presents a three-phase study of a robotic interview coach grounded in Person-Centered Therapy and instructional scaffolding. Findings demonstrate that user agency-specifically, dynamic control over feedback-resolves a tension between psychological safety and actionable guidance, significantly reducing interview-related anxiety while maintaining a strong therapeutic alliance. How can this adaptive scaffolding ecosystem be extended to other domains requiring personalized support and skill development?
The Fragile Performance of Competence
The job interview process, while designed to assess competence, frequently triggers a significant stress response that can obscure a candidate’s actual abilities. This isn’t simply nervousness; the inherent evaluative nature of interviews activates the sympathetic nervous system, leading to physiological changes like increased heart rate and cortisol production – a response historically linked to facing threats. Consequently, even highly skilled and experienced individuals may experience cognitive impairments, such as reduced working memory and difficulty articulating thoughts, effectively hindering their performance. The pressure to impress, coupled with the fear of rejection, creates a situation where a candidate’s potential remains unrealized, as their anxious state overshadows their qualifications and genuine capabilities. This mismatch between skill and demonstrated performance represents a substantial loss for both the individual and prospective employers.
Conventional job interview training typically centers on behavioral questions, technical skills, and company research, inadvertently overlooking the powerful influence of emotional regulation. This emphasis on what to say, rather than how to manage the accompanying stress, leaves many candidates vulnerable to performance anxiety. The physiological responses – increased heart rate, cognitive disruption, negative self-talk – triggered by this anxiety can significantly impair memory recall and articulate thought, effectively obscuring a candidate’s qualifications despite diligent preparation. Consequently, individuals may underperform, not due to a lack of skill, but because their emotional state prevents them from showcasing their abilities effectively, highlighting a critical gap in standard interview readiness programs.
Interview anxiety poses a particularly insidious challenge because it doesn’t discriminate based on competence; highly qualified individuals are often disproportionately affected by its impact on self-efficacy. The phenomenon stems from a disconnect between actual ability and perceived ability under pressure, where stress hormones and negative self-talk erode confidence. This erosion can manifest as difficulty recalling information, impaired communication skills, and a general sense of helplessness, leading candidates to underperform despite possessing the necessary skills and experience. Consequently, a capable applicant may present as less confident and less qualified than they truly are, creating a self-fulfilling prophecy where diminished self-belief hinders their chances of success – a frustrating outcome that highlights the critical need to address the emotional dimensions of the interview process.
Mirroring the Self: A Framework for Emotional Resonance
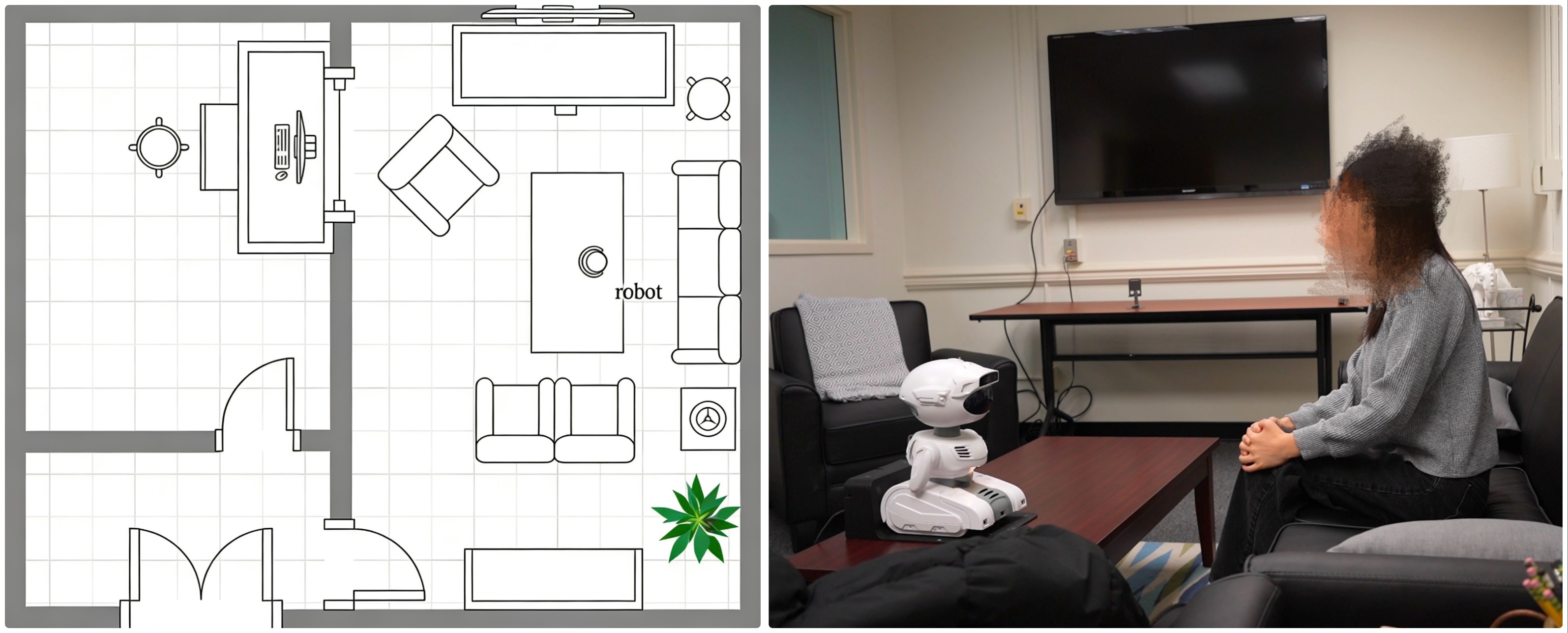
A social robot was utilized to create repeatable and standardized job interview simulations, offering a controlled environment for participants to practice and refine their interviewing skills. This approach addresses the limitations of traditional mock interviews, which are often subject to interviewer bias and inconsistent feedback. The robotic interviewer delivered a pre-programmed sequence of questions, ensuring each participant faced the same challenges, and allowed for precise measurement of responses and associated physiological data. By removing the pressure of evaluation from a human interviewer, the simulations aimed to provide a safe space for individuals, particularly those with social anxiety, to build confidence and reduce pre-interview stress.
Emotional reflection, as implemented in the social robot, involved the system identifying expressed emotions via analysis of vocal tone and facial expressions, and subsequently verbalizing a mirroring statement acknowledging the participant’s feelings. This process wasn’t simply restating the emotion; the robot employed phrasing designed to validate the participant’s experience, such as “You seem frustrated,” or “That sounds like it was stressful.” The objective was to establish a sense of being understood and create rapport, a key component in reducing anxiety during the simulated job interview scenario and encouraging open communication. This technique is based on principles of active listening and empathetic response commonly utilized in human-human interaction.
Early iterations of the job interview simulation utilized immediate feedback mechanisms following participant responses, intended to offer direct guidance on performance and address perceived shortcomings. However, analysis of initial data revealed this approach often increased participant anxiety and hindered the development of authentic responses; the constant feedback disrupted the natural flow of the interview and prompted a focus on correcting errors rather than practicing overall communication skills. Consequently, the feedback system was refined to prioritize delayed, summary feedback delivered at the conclusion of specific interview stages, allowing participants to self-reflect and minimizing the interruption of the simulated interaction.
Anxiety Check-in stages were implemented within the job interview simulation to quantitatively and qualitatively monitor participant distress levels. These stages, occurring at pre-defined intervals and following potentially stressful questioning, utilized a combination of self-reported anxiety scales – specifically the State-Trait Anxiety Inventory – and physiological data collected via wearable sensors measuring heart rate variability. Data collected during these check-ins informed real-time adjustments to the simulation’s difficulty and pacing, allowing the system to dynamically reduce stressors if participant anxiety exceeded pre-defined thresholds. Furthermore, collected data served as a basis for post-simulation analysis, enabling researchers to identify specific interview questions or scenarios that consistently triggered high levels of participant distress.
The Paradox of Guidance: Balancing Support and Agency
Adaptive scaffolding was implemented by modulating the assistance provided by the robotic system based on real-time performance metrics. This involved a tiered support structure, beginning with substantial guidance – such as trajectory pre-shaping and force assistance – which was then incrementally reduced as the user demonstrated proficiency in the task. The level of support was adjusted dynamically, responding to deviations from desired performance and utilizing a Kalman filter to estimate the user’s state and intent. This allowed the robot to provide targeted assistance only when needed, aiming to balance support with user agency and facilitate skill acquisition through guided exploration.
Research findings indicate that while scaffolding – the provision of temporary support to facilitate learning – is generally beneficial, immediate and continuous feedback can paradoxically impede performance. Data collected during trials demonstrated that subjects receiving feedback after each action exhibited disrupted workflow and lower overall task completion rates compared to those receiving less frequent guidance. This suggests that the interruption caused by constant correction outweighs the benefit of immediate error resolution, potentially hindering the development of internal problem-solving strategies and impacting the user’s ability to maintain a consistent cognitive state during task execution. The observed effect was particularly pronounced in tasks requiring sustained attention and complex motor skills.
Research indicated that delivering feedback at the conclusion of a user’s response sequence yielded improved outcomes in specific interaction contexts. This approach differed from immediate feedback, where corrections or suggestions were provided during response generation. Data showed that delayed feedback allowed users to complete their thought process without interruption, fostering a sense of agency and promoting self-correction. Specifically, this method proved more effective when the task involved complex problem-solving or required a degree of creative input, as immediate intervention appeared to disrupt cognitive flow and negatively impact performance metrics like completion rate and solution quality.
The facilitation of genuine learning is significantly enhanced by prioritizing learner agency and self-correction mechanisms. Research indicates that individuals demonstrate improved performance and retention when afforded opportunities to independently identify and rectify errors, rather than receiving immediate, prescriptive guidance. This approach fosters a deeper understanding of underlying principles and promotes the development of problem-solving skills, as the learner actively engages in the iterative process of hypothesis, testing, and refinement. Consequently, instructional strategies should emphasize creating environments where learners are empowered to take ownership of their learning journey and cultivate the ability to independently assess and improve their performance.
Empowering the Candidate: A System of Self-Directed Growth
A novel interaction system was developed, centering on participant control over the delivery of feedback. This mixed-mode approach diverges from traditional robotic coaching paradigms by prioritizing user agency; individuals actively determine when and if they receive guidance from the robotic system. Rather than a continuous stream of commentary, the system remains responsive, offering professional insights only upon explicit request. This design choice is rooted in the understanding that unsolicited advice can undermine intrinsic motivation and self-confidence, while empowering individuals to seek feedback fosters a sense of ownership over their progress and encourages thoughtful self-reflection.
The system intentionally cultivates a sense of personal control, recognizing that genuine growth stems from internally motivated action rather than externally directed instruction. By allowing participants to actively solicit feedback, the interaction model encourages deep self-assessment and the development of metacognitive skills. This isn’t merely about receiving advice; it’s about choosing to seek it, prompting individuals to critically evaluate their own performance and identify areas for improvement. The resulting process of self-directed learning not only builds confidence but also fosters a sustainable approach to personal development, where individuals become active agents in their own progress, rather than passive recipients of guidance.
The system intentionally positions the robotic coach as a supportive, rather than directive, presence by delivering professional feedback exclusively upon request. This design choice avoids the potential for unsolicited criticism, which can often hinder performance and erode confidence. Instead, the robot functions as a readily available resource, offering its expertise only when the participant actively seeks it, thereby fostering a sense of control and encouraging self-directed learning. This approach shifts the dynamic from a traditional evaluative scenario to a collaborative partnership, where the robot empowers the individual to identify areas for improvement and seek guidance on their own terms, ultimately maximizing the benefits of the coaching experience.
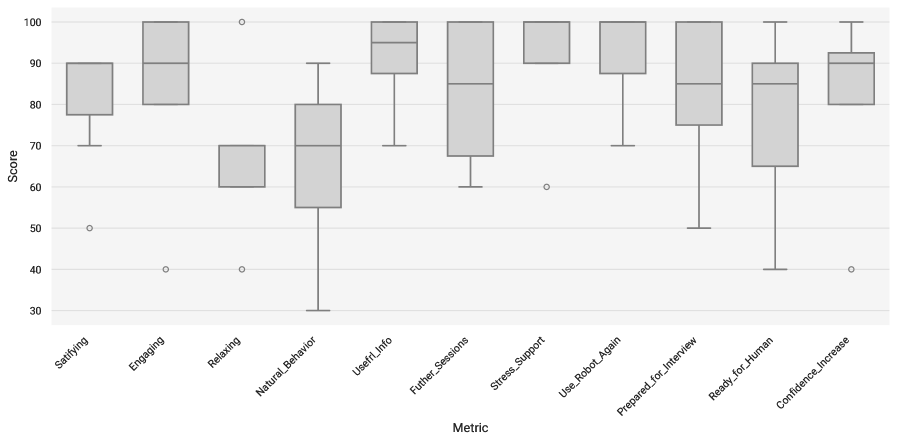
Findings from the study reveal a substantial decrease in self-reported social anxiety among participants, confirmed by a noteworthy reduction in scores on the Manifest Anxiety Scale – Interaction subscale (MASI). Beyond alleviating anxiety, the agency-driven interaction system fostered improvements in participants’ self-efficacy – their belief in their ability to succeed in social situations. Crucially, participants expressed considerable satisfaction with the robotic coach, suggesting the approach is not only effective in addressing social anxieties but also well-received as a supportive and empowering tool for personal growth. This positive reception underscores the potential for robotic coaching to serve as a valuable resource in promoting mental well-being and building confidence.
The pursuit of adaptive scaffolding, as demonstrated in this research, reveals a fundamental truth about complex systems. Every interaction, every adjustment the robotic coach makes, is a negotiation with the user’s evolving state. This echoes Andrey Kolmogorov’s observation: “The most important things are not those that are easy to express.” The subtlety of tailoring support-balancing guidance with user agency-is not easily quantifiable, yet it’s precisely this nuanced interaction that yields meaningful reductions in anxiety and enhances engagement. The system’s success isn’t merely in delivering information, but in responding to the implicit signals of the user’s internal state, a process akin to refactoring-a dialogue with the past to improve the present.
What Lies Ahead?
This work, charting a course through the complexities of adaptive scaffolding, inevitably reveals more questions than it resolves. Every commit is a record in the annals, and every version a chapter, but the very notion of a ‘successful’ interview – and, by extension, a successful robotic coach – remains stubbornly resistant to neat definition. The reduction of anxiety, while measurable, is merely a symptom addressed, not the underlying condition. Future iterations must confront the possibility that optimized performance, coaxed from a user via robotic intervention, is a fundamentally different outcome than authentic self-presentation.
The emphasis on user agency, rightly highlighted, introduces a temporal paradox. Increased control demands greater cognitive load, potentially exacerbating the very anxiety the system aims to alleviate. Delaying fixes is a tax on ambition; pushing for ever-more-sophisticated personalization without addressing the core issue of robotic presence risks building a gilded cage. The field must now grapple with the ethical implications of automating aspects of self-improvement – is the goal to prepare individuals for the interview, or to reshape them to fit an algorithmic ideal?
Ultimately, the longevity of such systems will not be determined by their technical prowess, but by their capacity to age gracefully. The scaffolding, by its nature, must eventually be dismantled. The true measure of success will lie in the extent to which the robot fades into irrelevance, having empowered the user to conduct their own interviews – and, more importantly, to define their own terms.
Original article: https://arxiv.org/pdf/2601.15600.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-01-23 19:16