Author: Denis Avetisyan
A new framework streamlines the transfer of learned skills to physical robots, accelerating development and deployment across diverse platforms.
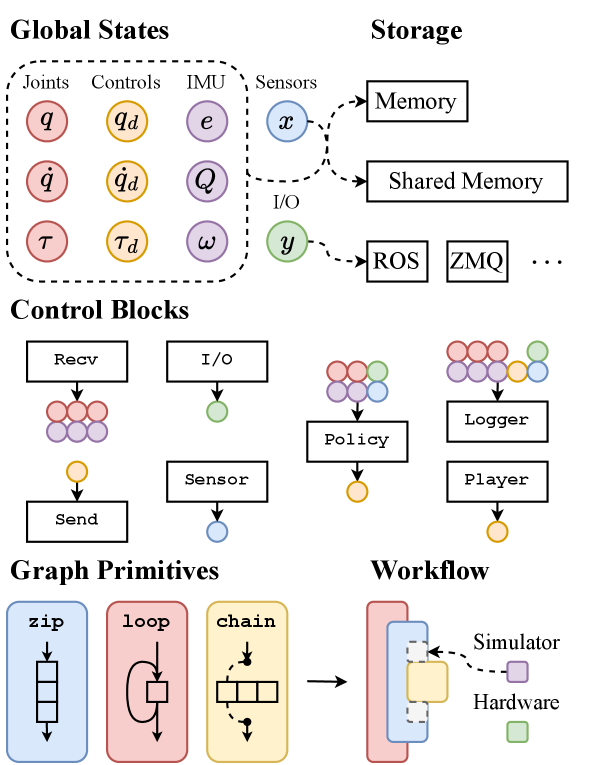
UniCon unifies robot control through vectorized states and modular control blocks, enabling efficient sim-to-real transfer and low-latency inference.
Deploying learned control policies across diverse robotic platforms remains a significant challenge due to inconsistencies in hardware interfaces and inefficient communication. To address this, we introduce ‘UniCon: A Unified System for Efficient Robot Learning Transfers’, a lightweight framework that standardizes robot control by decoupling global state representation from modular, reusable control blocks. This data-oriented design enables efficient, vectorized data flow and facilitates seamless sim-to-real transfer with minimal code redundancy, demonstrated across over 12 robot models from 7 manufacturers. Will this unified approach unlock a new era of rapid deployment and generalization for robot learning algorithms?
The Inherent Instability of Empirical Control
Historically, achieving reliable robotic movement has depended on engineers meticulously adjusting control parameters – a process akin to fine-tuning an instrument by hand. However, this approach falters when robots encounter the unpredictable nature of real-world environments. Subtle changes in terrain, lighting, or even the object being manipulated can throw these carefully calibrated systems off balance, leading to instability or failure. The rigidity of these hand-tuned systems struggles to accommodate the inherent variability present in dynamic scenarios, necessitating constant readjustment and limiting a robot’s capacity to operate autonomously in complex, unstructured settings. This reliance on precise, pre-defined settings presents a significant hurdle in deploying robots beyond highly controlled environments like factory assembly lines.
Conventional robotic control systems frequently falter when confronted with the unpredictable nature of real-world environments. These systems, typically reliant on pre-programmed instructions and meticulously adjusted parameters, demonstrate limited capacity to adjust to even slight deviations from anticipated conditions. A robot expertly navigating a controlled laboratory setting may experience significant performance degradation when introduced to uneven terrain, changing lighting, or unexpected obstacles. This inflexibility stems from the difficulty of anticipating and coding responses for every conceivable scenario, highlighting a crucial need for robots capable of intrinsic adaptability. Robust performance, therefore, necessitates a move beyond rigid, pre-defined behaviors towards systems that can perceive changes, learn from experience, and modify their actions accordingly – a challenge driving current research into more intelligent and resilient robotic platforms.
The pursuit of truly versatile robotics necessitates moving beyond the limitations of traditional, reactive programming. Historically, robots have been meticulously programmed with specific instructions for anticipated scenarios, a method that falters when confronted with the inherent unpredictability of real-world environments. Instead, a paradigm shift towards learning-based approaches – leveraging techniques like reinforcement learning and imitation learning – allows robots to adapt and refine their behaviors through experience. These methods enable a robot to autonomously acquire complex skills, generalizing from limited data and continuously improving performance without explicit reprogramming for every novel situation. This transition isn’t merely about automation; it’s about fostering robotic intelligence capable of tackling intricate tasks and navigating dynamic environments with a level of flexibility previously unattainable.
UniCon: A Framework Rooted in Mathematical Purity
UniCon is designed as a lightweight framework to reduce the complexity associated with deploying robot learning algorithms. This is achieved by minimizing external dependencies and focusing on core functionalities required for algorithm integration and execution. Unlike heavier robotic operating systems that often include extensive, and potentially unnecessary, features, UniCon prioritizes a minimal footprint. This streamlined approach allows developers to quickly test and iterate on learning algorithms without significant overhead, reducing development time and resource consumption. The framework’s lightweight nature also facilitates deployment on robots with limited computational resources, broadening its applicability across a wider range of robotic platforms.
UniCon employs an Entity Component System (ECS) architecture, a design pattern centered around composition rather than inheritance. In this system, entities are identifiers, components are data containers holding specific attributes (e.g., position, velocity), and systems operate on entities possessing relevant components. This decoupling of data and logic promotes modularity by allowing developers to add or remove functionality through component and system modifications without altering existing code. The ECS approach facilitates code reuse, simplifies testing, and enhances maintainability by minimizing dependencies between different parts of the robot learning framework.
UniCon employs vectorized states to significantly improve data handling and computational efficiency. Traditional robot learning systems often represent robot state as disparate variables, leading to inefficient memory access patterns and increased data transfer overhead. UniCon consolidates these state variables into contiguous, vectorized arrays. This optimization allows for Single Instruction, Multiple Data (SIMD) operations and leverages optimized linear algebra libraries. Consequently, data exchange between components is minimized, memory layout is simplified, and overall performance is enhanced, particularly during simulation and real-time control loops.
UniCon’s architecture is fundamentally built upon functional programming principles, prioritizing predictability and code maintainability. This design choice avoids the stateful mutations common in imperative programming, leading to more robust and testable components. Critically, the framework’s functional approach minimizes the additional lines of code (SLOC) required for transferring learned policies to new robotic systems or environments; ad-hoc implementations of robot learning algorithms often necessitate substantial code rewriting and adaptation for such transfers, a burden effectively eliminated by UniCon’s inherent flexibility and composability.
Orchestrating Control Through Graph Theory and Efficient Access
UniCon utilizes a Control Flow Graph (CFG) as its central mechanism for managing robotic control workflows. This CFG represents the system’s logic as a directed graph, with nodes representing individual control blocks – discrete units of functionality – and edges defining the sequential or conditional dependencies between them. By explicitly modeling these dependencies, UniCon enables dynamic reconfiguration of control sequences at runtime, allowing for adaptive behavior and efficient handling of complex tasks. The graph structure facilitates both hierarchical decomposition of large problems into manageable sub-components and parallel execution of independent control blocks, optimizing performance and resource utilization. Furthermore, the CFG serves as a standardized interface for integrating diverse control algorithms and hardware components within the framework.
Zero-Copy Access within UniCon eliminates redundant data transfer between components by leveraging shared memory and direct pointer access. Traditional data exchange often involves copying data from one process’s memory space to another, incurring significant overhead, particularly with large datasets common in robotics and real-time systems. UniCon’s implementation avoids these copies by allowing components to directly access data in the originating process’s memory, reducing latency and improving throughput. This is achieved through memory mapping and careful management of data ownership, ensuring data consistency without the performance penalty of repeated data duplication. The benefit is particularly pronounced in applications requiring high-bandwidth, low-latency communication between perception, planning, and control loops.
UniCon utilizes Modular Control Blocks (MCBs) as self-contained, reusable components for implementing control logic. These MCBs encapsulate specific functionalities, such as sensor processing, motion planning, or actuator control, and can be combined and reconfigured without modifying the core framework. This modularity significantly accelerates the prototyping process by allowing developers to assemble complex behaviors from pre-built, tested blocks. Furthermore, MCBs facilitate adaptation to new environments or tasks, as existing blocks can be easily swapped or re-parameterized, reducing development time and effort compared to monolithic control systems. The framework supports the creation of custom MCBs, extending its functionality beyond the provided library of components.
UniCon builds upon the Robot Operating System (ROS) by introducing a higher-level abstraction specifically designed for streamlining learning deployments. Performance evaluations demonstrate that UniCon achieves near-zero inference latency overhead when compared to direct Software Development Kit (SDK) implementations. Benchmarking indicates a significant performance improvement over standard ROS deployments; UniCon consistently outperforms ROS in comparable learning scenarios, reducing processing time and enabling more responsive robotic systems.
Bridging the Fidelity Gap: Simulation to Robust Real-World Performance
UniCon facilitates a crucial bridge between the virtual and physical realms through robust Sim-to-Real transfer capabilities. This functionality allows control policies – the ‘brains’ dictating a robot’s actions – to be initially developed and refined entirely within a simulated environment before being directly deployed onto a physical robot. This approach drastically reduces the time, cost, and risk associated with real-world training, as robots can learn and adapt without the potential for damage or costly errors. By successfully transferring learned behaviors, UniCon enables robots to operate effectively in complex, unpredictable environments, paving the way for more autonomous and adaptable robotic systems capable of tackling real-world challenges.
A critical component of UniCon is its integrated Real-to-Sim analysis, a systematic process designed to bridge the gap between simulated environments and the complexities of the physical world. This analysis doesn’t simply compare outputs; it actively identifies discrepancies in dynamics, sensor readings, and environmental factors by contrasting data gathered from a physical robot operating in a real environment with its digital counterpart within the simulation. Through this detailed comparison, researchers can pinpoint the sources of simulation inaccuracies – perhaps a friction coefficient that’s too low, or a simplified model of aerodynamic drag. These identified discrepancies then inform iterative improvements to the simulation’s fidelity, ensuring that policies trained within the virtual realm are more likely to translate successfully to robust performance on actual robotic hardware. Ultimately, this continuous refinement process minimizes the need for extensive real-world training and accelerates the development of adaptable, intelligent systems.
To bridge the gap between simulated training and real-world performance, UniCon employs domain randomization, a technique that intentionally varies simulation parameters during training. This process exposes the learning agent to a wide range of conditions – altering factors like lighting, friction, object textures, and even robot dynamics – effectively forcing it to develop policies robust to unforeseen variations. By training on a deliberately diverse set of simulated realities, the resulting controllers exhibit significantly improved generalization capabilities when deployed on the physical robot, minimizing the performance drop commonly experienced when transferring policies from simulation to reality. This approach doesn’t require precise modeling of the real world; instead, it prioritizes creating a policy adaptable enough to function reliably across a spectrum of potential conditions, bolstering the system’s resilience and reducing the need for extensive real-world fine-tuning.
UniCon’s architecture is fundamentally built upon a synergistic integration with the PX4 autopilot system and the power of Reinforcement Learning, yielding controllers capable of dynamic adaptation to changing conditions. This combination allows for the creation of intelligent behaviors not pre-programmed, but learned through interaction with both simulated and real-world environments. Crucially, the system is engineered for speed and responsiveness; UniCon achieves a remarkable state refresh rate of 500Hz when operating with the H1 robot SDK, enabling precise and timely control actions even in fast-paced scenarios. This high-frequency data processing is essential for stabilizing agile flight and executing complex maneuvers, representing a significant advancement in robotic autonomy and control precision.

The pursuit of efficiency in robotic control, as demonstrated by UniCon, aligns with a fundamental tenet of computer science: elegant solutions stem from mathematical rigor. Donald Knuth observed, “Premature optimization is the root of all evil,” yet UniCon’s data-oriented design and modular control blocks aren’t simply optimizations; they represent a principled approach to managing complexity. By separating global states and vectorizing operations, the framework minimizes redundant computations, achieving low-latency inference. This isn’t about making code run faster initially, but establishing a scalable foundation rooted in algorithmic clarity, ensuring performance gains persist across diverse robotic platforms and future expansions. The core concept of modularity, central to UniCon, mirrors the power of well-defined mathematical functions – each block a self-contained unit contributing to a larger, provable system.
Future Directions
The elegance of UniCon lies not in the breadth of robots it currently supports, but in the demonstrable consistency of its underlying principles. The framework offers a compelling demonstration that a separation of global state from modular control – a conceptually simple proposition – yields measurable improvements in sim-to-real transfer. However, this is merely a first step. The true test will be the framework’s capacity to scale – not in the number of supported platforms, but in the complexity of tasks it can reliably execute. Current metrics primarily address low-latency inference; a rigorous analysis of the framework’s performance under conditions of genuine environmental uncertainty remains conspicuously absent.
Furthermore, the emphasis on vectorized states, while computationally efficient, introduces a potential rigidity. The physical world is rarely so neatly organized. Future work should investigate methods for gracefully handling state representations that are inherently noisy, incomplete, or subject to unpredictable discontinuities. A purely data-driven approach, divorced from mathematical guarantees of stability and convergence, will ultimately prove insufficient.
The pursuit of generalized robot intelligence requires more than clever workflow composition. It demands a commitment to formal verification – a demonstration that the underlying algorithms are, in principle, correct. Until such rigor is achieved, the field will remain trapped in a cycle of empirical observation and ad-hoc solutions, forever chasing improvements that may, in fact, be illusory.
Original article: https://arxiv.org/pdf/2601.14617.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-01-23 04:12