Author: Denis Avetisyan
Researchers are developing new methods for robots to negotiate and coordinate complex tasks, enabling more effective teamwork in challenging environments.
This work introduces CLiMRS, a framework leveraging large language models and adaptive group negotiation to facilitate robust, heterogeneous multi-robot collaboration on long-horizon tasks within the CLiMBench benchmark.
Coordinating heterogeneous robot teams in complex, long-horizon tasks remains challenging due to spatial constraints and environmental uncertainties. This paper introduces ‘Leveraging Adaptive Group Negotiation for Heterogeneous Multi-Robot Collaboration with Large Language Models’, presenting CLiMRS, a novel framework that pairs robots with Large Language Models (LLMs) and employs adaptive group negotiation for efficient collaboration. Through a grouping-planning-execution-feedback loop and demonstrated on the CLiMBench benchmark, CLiMRS achieves over 40% higher efficiency on complex assembly tasks compared to existing methods. Could this human-inspired approach to group dynamics unlock a new era of robust and adaptable multi-robot systems?
The Inherent Limitations of Conventional Robotic Systems
Conventional robotic systems frequently encounter limitations when confronted with tasks demanding a broad spectrum of skills and the ability to adjust to changing conditions. These robots are often designed for highly specific, repetitive actions within structured environments, relying on precise pre-programming and predictable scenarios. However, real-world applications frequently require robots to integrate diverse capabilities – such as manipulation, navigation, and sensing – and to dynamically adapt to unforeseen obstacles, shifting goals, or unpredictable human interaction. This inflexibility stems from the difficulty in creating control systems that can effectively manage the complex interplay between multiple robotic functions and seamlessly incorporate real-time sensory feedback, hindering their performance in unstructured and dynamic settings.
The pursuit of truly collaborative robotics necessitates a departure from rigid, pre-programmed sequences. Current systems often rely on meticulously planned actions, limiting their effectiveness when confronted with the unpredictable nature of real-world scenarios. Instead, future robotic teams must exhibit flexible coordination, dynamically adjusting strategies based on real-time data and unforeseen circumstances. This requires advancements in areas like decentralized control, where individual robots make independent decisions while maintaining a cohesive group objective, and sophisticated communication protocols enabling seamless information exchange. Such a shift promises robots capable of tackling complex, unstructured tasks – from disaster response and environmental monitoring to advanced manufacturing – with a level of adaptability previously unattainable, ultimately moving the field beyond automation towards genuine robotic partnership.
Current robotic systems frequently falter when confronted with the unpredictable nature of real-world scenarios. Traditional architectures struggle to synthesize data from multiple sensors and sources – visual input, force feedback, spatial mapping – into a coherent understanding of their surroundings. This limitation hinders effective response to unexpected obstacles, shifting task priorities, or novel situations. Consequently, robots often require human intervention or exhibit rigid, pre-defined behaviors, proving inefficient in dynamic environments. The core issue isn’t a lack of individual component capability, but rather the inability to seamlessly integrate diverse information streams and dynamically adjust operational parameters, representing a significant obstacle to achieving truly adaptable and collaborative robotic systems.
Leveraging Linguistic Abstraction for Adaptive Group Negotiation
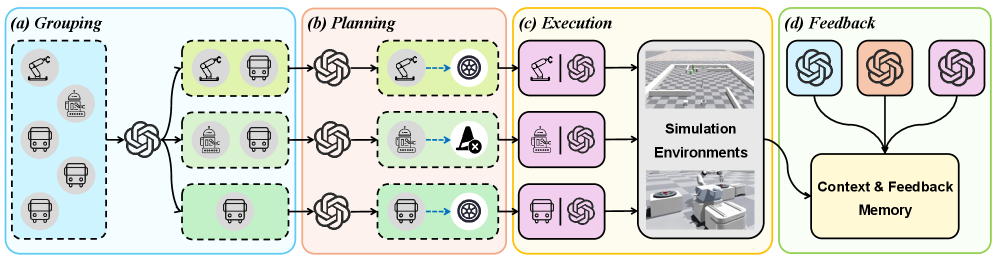
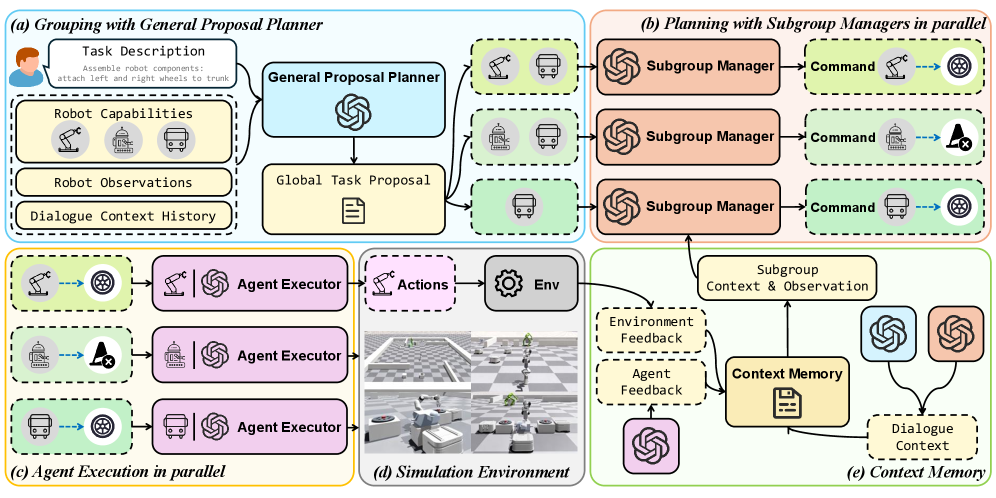
The CLiMRS framework introduces a novel approach to group negotiation for teams comprised of robots with differing capabilities. It utilizes Large Language Models (LLMs) to facilitate communication and coordination among these heterogeneous robotic agents. This architecture allows robots to engage in dynamic negotiation, enabling them to collaboratively determine optimal task allocation and action sequencing without reliance on pre-programmed strategies. The framework’s core innovation lies in its ability to translate task requirements into natural language prompts for the LLM, and subsequently interpret the LLM’s responses into actionable commands for each robot within the team. This LLM-mediated negotiation supports adaptability in response to changing environmental conditions and unforeseen challenges during task execution.
The CLiMRS framework facilitates dynamic subgroup formation in robotic teams by assessing task requirements and environmental conditions in real-time. This allows robots to autonomously organize into optimized groups for specific objectives, rather than relying on pre-defined team structures. Coordination is achieved through negotiation protocols managed by the integrated Large Language Model, enabling robots to distribute tasks and synchronize actions based on each subgroup’s capabilities and the current situation. This adaptive grouping improves efficiency and robustness, particularly in complex or changing environments where fixed team assignments would be suboptimal.
CLiMRS incorporates a continuous learning loop by integrating dialogue history with execution feedback to refine collaborative strategies. Specifically, the system records the content of negotiations between robots, creating a historical record of proposed actions and agreements. This dialogue history is then coupled with data regarding the actual outcomes of executed plans – successes, failures, and identified inefficiencies. This combined data is used to adjust the LLM’s reasoning processes, allowing it to improve future negotiation tactics and action plan proposals. The result is an adaptive system where robotic teams progressively enhance their coordination and efficiency over time, based on empirical evidence from past interactions and task executions.
The CLiMRS framework utilizes Large Language Models (LLMs) to enable robotic agents to process task objectives and formulate collaborative action plans through negotiation. This is achieved by representing task goals and constraints in a format suitable for LLM reasoning, allowing robots to infer optimal strategies and propose actions to teammates. The LLM facilitates the identification of potential conflicts or inefficiencies in proposed plans, prompting robots to engage in dialogue to reach mutually beneficial agreements. This negotiation process, driven by the LLM’s reasoning capabilities, results in the dynamic creation of efficient action plans tailored to the specific task and team composition, moving beyond pre-programmed behaviors to achieve adaptable and optimized group performance.
Establishing a Rigorous Benchmark for Collaborative Robotics
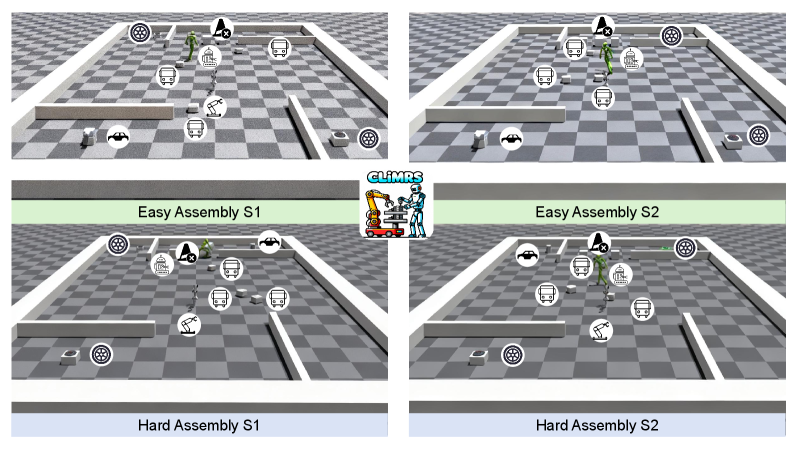
CLiMBench is a benchmarking environment designed to assess the performance of collaborative robotic systems comprised of diverse robot types. It provides a physically realistic simulation, leveraging the IsaacGym platform to model robot dynamics and interactions. The environment presents assembly tasks requiring coordination between robots with differing capabilities and control methodologies, thus creating a challenging testbed for heterogeneous multi-robot collaboration algorithms. This allows for quantifiable evaluation of system performance across key metrics like success rate and task completion time, facilitating comparative analysis of different approaches to robotic collaboration.
IsaacGym is a physics simulator utilized within the CLiMBench environment to provide a high-fidelity, GPU-accelerated simulation of robotic interactions. This enables the training and testing of multi-robot collaboration algorithms with physically plausible dynamics and contact modeling. The GPU acceleration significantly reduces simulation time, allowing for extensive experimentation and data collection required for robust algorithm development. Specifically, IsaacGym facilitates the simulation of complex scenarios involving multiple robots operating concurrently, and provides accurate representation of forces, torques, and collisions crucial for validating the performance of algorithms like CLiMRS.
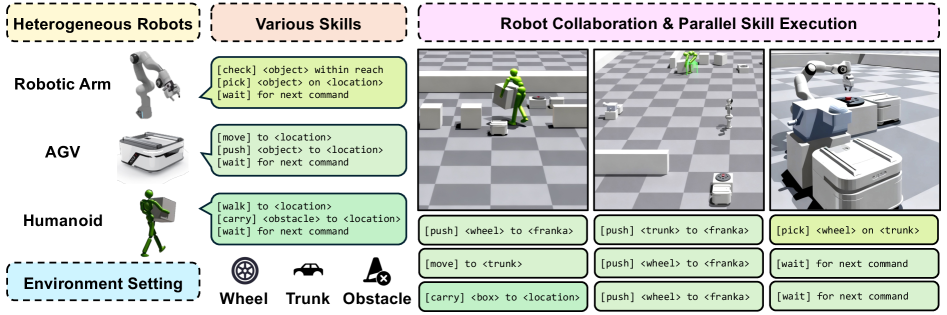
The CLiMBench simulation environment incorporates a heterogeneous robotic team consisting of a Franka Panda Arm, a TRACER Mini Robot, and a Humanoid Robot to assess collaborative capabilities. The Franka Panda Arm provides manipulation functionality, while the TRACER Mini Robot offers mobile base capabilities for ground-level tasks. The inclusion of a Humanoid Robot introduces bipedal locomotion and further expands the range of potential collaborative actions. This diverse robotic composition allows for the evaluation of complex, multi-robot workflows requiring varied physical capabilities and coordination strategies, representing a realistic assembly scenario.
The CLiMRS system employs robot-specific control methodologies to maximize performance within the CLiMBench simulation. The Franka Panda Arm utilizes an Operational-Space Controller, enabling precise manipulation and trajectory tracking crucial for assembly tasks. Simultaneously, the TRACER Mini Robot, functioning as a mobile platform, leverages a Rapidly-exploring Random Tree (RRT) algorithm for path planning and navigation across the simulated environment. This combination allows each robot to efficiently address its designated role – the arm for intricate manipulation and the ground vehicle for material transport – optimizing the overall collaborative workflow.
CLiMRS demonstrated complete reliability in performing the assembly tasks within the CLiMBench simulation environment, achieving a 100% success rate across all trials. This indicates a substantial improvement in task completion compared to existing methodologies. The system consistently and accurately completed the defined assembly sequences without failure, highlighting its robustness under the conditions presented by the CLiMBench benchmark. This perfect success rate was maintained throughout the testing procedure, validating the effectiveness of the collaborative multi-robot approach implemented in CLiMRS.
Quantitative evaluation within the CLiMBench simulation demonstrated that the CLiMRS system achieved a 44.30% reduction in the average number of steps required to complete assembly tasks. This performance improvement was calculated by comparing CLiMRS’s task completion metrics against the highest-performing baseline controller established within the CLiMBench environment. The reduction in steps signifies improved efficiency in task execution and suggests a more optimized approach to multi-robot collaboration for assembly operations as measured by the CLiMBench benchmark.
Towards a Future of Adaptable and Scalable Robotic Partnerships
A new framework, CLiMRS, combined with the CLiMBench benchmark suite, represents a notable advancement in enabling effective collaboration between diverse robotic systems. Existing approaches often struggle with the complexities introduced by heterogeneous teams – robots with varying capabilities, communication protocols, and sensing modalities. CLiMRS directly addresses these hurdles by providing a unified architecture that facilitates seamless interaction and task allocation. The system’s design prioritizes adaptability, allowing robots to dynamically adjust their strategies based on the evolving needs of the task and the contributions of their teammates. This results in more resilient and efficient multi-robot teams capable of tackling complex challenges that would overwhelm traditional, less flexible systems, paving the way for broader deployment in real-world scenarios.
Central to the CLiMRS framework is the integration of large language models (LLMs), which fundamentally shifts how multi-robot systems respond to complexity. Unlike traditional, pre-programmed approaches, LLMs empower robots with an unprecedented capacity for reasoning and generalization; they don’t simply react to known scenarios, but can interpret unforeseen circumstances and formulate appropriate responses. This linguistic grounding allows for nuanced task understanding and flexible plan adaptation, enabling the robots to navigate dynamic environments and collaboratively solve problems even when faced with unexpected obstacles or changes in objectives. The result is a system less brittle than its predecessors, capable of operating reliably in real-world conditions characterized by uncertainty and variability, and extending the potential application of multi-robot collaboration to previously intractable challenges.
Evaluations utilizing the COHERENT benchmark reveal a remarkably robust performance, with the system achieving a near-perfect, nearly 100% success rate across a suite of complex collaborative tasks. This consistently high level of achievement signifies the framework’s capacity to reliably coordinate robot actions, even when faced with intricate challenges demanding precise synchronization and communication. The results demonstrate not merely the ability to complete tasks, but to do so with exceptional consistency, solidifying its potential for deployment in real-world scenarios where dependable operation is paramount. Such a high success rate underscores the efficacy of the underlying architecture and its ability to handle the inherent complexities of multi-robot collaboration.
Evaluations utilizing the COHERENT benchmark revealed substantial improvements in task efficiency when employing CLiMRS, particularly within the most demanding “trio-type” scenarios. These tasks, designed to rigorously test collaborative capabilities, witnessed an average reduction of 18.6% in the number of steps required for successful completion. This signifies not merely an incremental gain, but a marked enhancement in the robots’ ability to coordinate actions and streamline processes while working together. The decrease in steps suggests a more intelligent allocation of roles, quicker decision-making, and optimized movement strategies, ultimately contributing to a more robust and effective multi-robot system capable of tackling complex challenges with greater speed and precision.
The versatility of this multi-robot framework extends far beyond controlled laboratory settings, promising substantial impact across a diverse range of practical applications. In manufacturing, coordinated robot teams can optimize assembly lines and manage complex material handling tasks with increased efficiency. Logistics operations stand to benefit from automated warehouse management and last-mile delivery solutions, while search and rescue missions could be revolutionized by robots capable of navigating hazardous environments and locating individuals in need. Perhaps most ambitiously, the framework’s adaptability positions it as a valuable asset for space exploration, enabling collaborative robotic systems to construct habitats, collect samples, and perform maintenance tasks on distant planets or moons, effectively expanding humanity’s reach beyond Earth.
Ongoing development of the CLiMRS framework prioritizes expansion beyond current capabilities, with a key focus on accommodating significantly larger robot teams and bridging the gap between simulation and real-world application. Researchers are actively investigating methods to maintain performance and coordination as the number of collaborative robots increases, addressing computational challenges and potential communication bottlenecks. Simultaneously, efforts are underway to integrate CLiMRS with a diverse array of physical sensors – including cameras, LiDAR, and tactile sensors – and actuators, allowing the system to interpret and respond to genuine environmental conditions. This integration will necessitate robust methods for handling sensor noise, imperfect data, and the inherent uncertainties of physical systems, ultimately paving the way for deployment in complex, real-world scenarios such as large-scale warehouse automation, expansive search and rescue operations, and collaborative space exploration.
The pursuit of robust multi-robot collaboration, as detailed in this work, demands a level of precision mirroring mathematical rigor. The CLiMRS framework, with its emphasis on adaptive group negotiation and LLM-driven planning, exemplifies this need. As Carl Friedrich Gauss aptly stated, “If other sciences are doubtful, mathematics is not.” This principle resonates deeply with the approach presented; the system isn’t merely attempting to function through trial and error, but strives for provable, logically sound interactions. The CLiMBench benchmark, used to validate CLiMRS, necessitates a solution free from ambiguity-a solution where correctness isn’t approximated, but definitively established through carefully designed negotiation protocols and feedback-driven planning.
What Lies Ahead?
The presented framework, while demonstrating a capacity for multi-robot collaboration guided by large language models, merely scratches the surface of a profoundly difficult problem. The true challenge isn’t simply achieving task completion, but formalizing the very notion of ‘robustness’ within a heterogeneous system. Current evaluation, even through benchmarks like CLiMBench, remains tethered to specific scenarios; a truly elegant solution demands provable guarantees regarding scalability and adaptability to unforeseen circumstances. The observed performance, while promising, is fundamentally empirical; a rigorous analysis of algorithmic complexity – measured not in lines of code, but in asymptotic behavior – remains conspicuously absent.
Future work must address the limitations inherent in relying on the ‘black box’ nature of large language models. While these models can generate plausible plans, their internal logic is often opaque, hindering the ability to diagnose failures or offer formal assurances. A fruitful avenue lies in integrating symbolic reasoning with LLM-generated plans, creating a hybrid system capable of both flexible adaptation and verifiable correctness. Furthermore, the negotiation protocols themselves require deeper scrutiny; current approaches often prioritize consensus over optimality, a decidedly un-mathematical compromise.
The ultimate goal should not be to mimic human-like collaboration, but to transcend it. Robots, unburdened by cognitive biases and emotional constraints, have the potential to achieve levels of coordination and efficiency unattainable by biological systems. However, this potential will remain unrealized until the field shifts its focus from pragmatic ‘solutions’ to mathematically rigorous algorithms, where elegance and provability are valued above all else.
Original article: https://arxiv.org/pdf/2602.06967.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-11 00:02