Author: Denis Avetisyan
Researchers have developed a robotic system that physically replicates human movements, offering a standardized way to evaluate the performance of Augmented Reality applications.

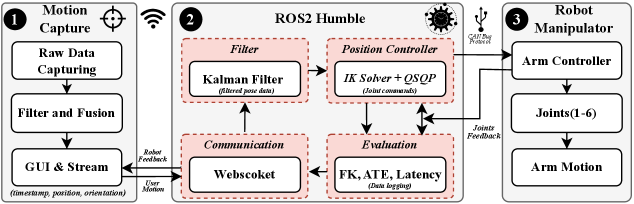
A high-fidelity robotic teleoperation framework enables repeatable, human-centered evaluation of AR systems through precise motion capture and trajectory tracking.
Evaluating Augmented Reality (AR) systems demands repeatable precision, yet human motion inherently lacks the consistency needed for reliable benchmarking. This limitation motivates the work presented in ‘A High-Fidelity Robotic Manipulator Teleoperation Framework for Human-Centered Augmented Reality Evaluation’, which introduces ARBot, a platform enabling robotic replay of natural human movements as a high-fidelity physical proxy. By combining custom computer vision, inertial measurement, and a proactively-safe Quadratic Programming controller, ARBot captures and reproduces complex trajectories with unprecedented accuracy-we also release a benchmark dataset of 132 human and synthetic motions. Will this approach unlock a new era of standardized, controllable AR evaluation and accelerate the development of more robust and intuitive augmented experiences?
The Illusory Nature of Subjective AR Evaluation
The assessment of Augmented Reality (AR) experiences currently relies heavily on user surveys and qualitative feedback, introducing a significant degree of subjectivity into the evaluation process. While valuable, these methods often fail to provide the precise, repeatable metrics needed for rigorous comparison between different AR systems or iterative design improvements. This lack of standardized measurement extends to critical elements like visual fidelity, spatial accuracy, and interaction responsiveness; evaluations frequently report ‘good’ or ‘bad’ experiences without quantifying how good or bad they are. Consequently, developers struggle to objectively benchmark performance, pinpoint areas for optimization, and demonstrate tangible progress – creating a bottleneck in the advancement of AR technology and hindering its widespread adoption. The field requires a shift towards quantifiable metrics and standardized testing protocols to ensure consistent, reliable, and comparable evaluations of AR experiences.
The absence of standardized evaluation metrics for Augmented Reality (AR) presents a significant obstacle to innovation and widespread adoption. Without objective benchmarks, developers struggle to efficiently refine AR experiences, often relying on user feedback that, while valuable, is inherently subjective and difficult to replicate. This lack of comparability extends to assessing different AR systems; determining which technology offers superior performance or user experience becomes problematic, slowing down investment and hindering meaningful progress. Consequently, the field is hampered by a bottleneck where iterative improvement and direct comparison are difficult, ultimately delaying the realization of AR’s full potential and impeding the creation of truly compelling applications.
Evaluating augmented reality (AR) experiences presents a unique challenge because current methods often fail to fully capture the subtleties of how humans interact with these systems. A key difficulty lies in accurately measuring latency – the delay between a user’s action and the AR system’s response – and tracking accuracy, which determines how well virtual objects are anchored to the real world. These factors significantly impact user perception and comfort; even slight discrepancies can cause disorientation or break the illusion of presence. Traditional evaluation metrics, such as frame rates or objective measurements of tracking error, often don’t correlate well with subjective user experience, meaning a system might perform well on paper but feel clunky or unnatural in practice. Consequently, researchers are increasingly focused on developing more holistic evaluation frameworks that combine objective data with user feedback, physiological measurements – like eye-tracking and heart rate – and behavioral analysis to gain a more complete understanding of how humans perceive and interact with AR environments.
ARBot: A Robotic Proxy for Deterministic AR Evaluation
ARBot employs a robot manipulator – specifically a robotic arm with six degrees of freedom – to physically replicate user interactions within augmented reality environments. This is achieved by translating captured human motion data into robot control commands. The robotic arm then performs the recorded movements in the physical world, simulating a user’s actions, such as reaching, grasping, or manipulating virtual objects overlaid in the AR experience. This physical execution allows for objective measurement of AR system accuracy and responsiveness by comparing the intended virtual interaction with the resulting physical outcome.
ARBot generates precise motion profiles by integrating data from multiple sources. Teleoperation allows a human operator to demonstrate desired interactions within the augmented reality environment. Simultaneously, a human motion capture system records the operator’s movements, providing kinematic data. This data is then fused with computer vision tracking of the AR environment and inertial measurement unit (IMU) readings from the robotic manipulator. The combined data stream enables the system to reconstruct and accurately replicate complex human gestures and interactions, forming the basis for repeatable AR evaluation scenarios.
ARBot addresses limitations in current Augmented Reality (AR) system evaluation by offering a standardized and repeatable testing methodology. Traditional AR performance assessment relies heavily on subjective human evaluations, introducing variability due to differing user skill, fatigue, and interpretation. By automating physical interactions within AR environments-such as object manipulation or spatial navigation-ARBot delivers consistent execution of predefined motion profiles. This automated approach allows for quantitative measurement of AR system metrics-like tracking accuracy, latency, and stability-under controlled conditions. Consequently, developers can reliably compare AR system performance across different configurations, algorithms, or hardware, facilitating objective optimization and benchmarking.
![Robotic replication of a single human trajectory achieves significantly higher repeatability [latex] (ITV << 3.91 \text{ mm}) [/latex] compared to natural human variation [latex] (ITV \approx 27.69 \text{ mm}) [/latex].](https://arxiv.org/html/2602.06273v1/x6.png)
Precise Control and Tracking: The Foundations of Objective Measurement
ARBot’s motion planning utilizes Inverse Kinematics (IK) to calculate joint angles required to achieve desired end-effector positions, effectively translating task-space goals into robot-executable movements. To ensure safe and dynamically feasible trajectories, a Quadratic Programming (QP) optimization framework is integrated with the IK solution. This QP formulation minimizes jerk and acceleration while satisfying joint limits and obstacle avoidance constraints. By mirroring human kinematics – specifically, prioritizing smooth, low-acceleration movements – the system aims to enhance user comfort and predictability during human-robot interaction. The resultant motion profiles are computationally efficient, enabling real-time control and responsiveness.
The ARPose application employs Visual-Inertial Odometry (VIO) to establish precise positional tracking of both the human user and the robotic system. VIO integrates data from vision sensors – typically cameras – with inertial measurement units (IMUs) containing accelerometers and gyroscopes. This sensor fusion technique allows ARPose to estimate six degrees of freedom (6DoF) pose – position and orientation – in real-time. By simultaneously tracking the human and robot, ARPose facilitates accurate spatial awareness and enables coordinated movements between the two, crucial for applications such as collaborative robotics and augmented guidance. The system achieves this by continuously refining pose estimates through iterative optimization algorithms, minimizing error based on observed visual features and inertial measurements.
System performance is quantitatively assessed through measurements of System Latency and Trajectory Error. The ARPose Application, utilizing Visual-Inertial Odometry, exhibits a latency of 19.5ms, while a combined Computer Vision and Inertial Measurement Unit (IMU) approach yields a latency of 90.5ms. Trajectory error, calculated as the median absolute difference between the actual and expected trajectories, is measured at 5.0mm. These metrics are critical for evaluating the responsiveness and accuracy of the augmented reality system, directly impacting the synchronization between human and robot movements and the overall user experience.
![Spatial dynamics analysis reveals that the system exhibits low positioning errors (less than [latex]7.5[/latex] mm, indicated in blue) for Square and Circle trajectories, but experiences higher errors (up to [latex]20[/latex] mm, indicated in red) for the more complex S-Shape trajectory, as shown by the error heatmaps and temporal error evolution.](https://arxiv.org/html/2602.06273v1/x5.png)
Demonstrating Superior Repeatability and the Future of AR Evaluation
Rigorous user studies were conducted to determine how easily and efficiently individuals could interact with ARBot. Participants engaged with the platform while researchers measured usability through the System Usability Scale (SUS), a widely-adopted questionnaire for assessing perceived ease of use. Simultaneously, the NASA-Task Load Index (NASA-TLX) quantified the mental demand, physical effort, temporal demand, performance, effort level, and frustration associated with completing tasks using ARBot. These combined metrics provided a comprehensive understanding of the user experience, revealing not just if the system was usable, but how usable it was and what cognitive burdens it might impose on operators. The resulting data is crucial for iterative design improvements and ensuring ARBot integrates seamlessly into real-world workflows.
A key advantage of the ARBot platform lies in its exceptional repeatability, demonstrably exceeding human performance in motion execution. Quantitative analysis revealed a 10.2-fold improvement in consistency, as measured by Inter-Trial Variability. Specifically, the ARPose system achieved a mean positional error of just 7.40mm across repeated trials, a significant reduction compared to the 75.59mm observed with human motion. Similarly, a combined Computer Vision and Inertial Measurement Unit (IMU) approach registered 13.73mm of variability, substantially lower than the 46.48mm recorded for human performance. This heightened precision suggests ARBot offers a robust and objective method for generating repeatable augmented reality interactions, minimizing the inconsistencies inherent in manual demonstrations and paving the way for more reliable data collection and analysis in AR development.
Augmented reality development has historically faced challenges in objectively evaluating system performance, often relying on user perceptions and qualitative feedback. However, the emergence of platforms like ARBot promises a shift towards data-driven insights. By providing highly repeatable and precise motion capture – significantly reducing variability compared to human performance – ARBot generates objective metrics for assessing AR experiences. This capability is crucial for streamlining the development process, allowing engineers to quantify improvements, identify bottlenecks, and validate design choices with greater confidence, ultimately diminishing the need for potentially biased or inconsistent subjective evaluations and fostering a more rigorous and efficient approach to AR innovation.
The pursuit of ARBot, as detailed in this framework, echoes a fundamental principle of elegant engineering. The system isn’t simply working-demonstrating functionality through trial and error-but is built upon a foundation of provable accuracy in trajectory tracking and repeatable motion. As Linus Torvalds aptly stated, “Most programmers think that if it isn’t broken, don’t fix it. I think that’s a terrible approach.” This platform’s design, prioritizing mathematical fidelity and quantifiable performance, moves beyond empirical validation. It aims to establish invariants-predictable, demonstrable truths-within the often-subjective realm of Augmented Reality evaluation. The result isn’t just a functional teleoperation system; it’s a verifiable benchmark for AR fidelity.
Future Directions
The presentation of ARBot, while a step toward quantifiable evaluation of augmented reality experiences, merely highlights the enduring difficulty of bridging the gap between digital promise and physical reality. The platform’s reliance on quadratic programming for trajectory tracking, though effective, implicitly acknowledges the computational cost of true physical fidelity. Future work must address this, seeking algorithms that approach deterministic behavior with minimal resource expenditure – a pursuit of elegance, not simply efficiency.
A critical limitation remains the inherent complexity of human motion itself. Current methodologies assume repeatability in human performance, a premise demonstrably false. The next iteration of this research should explore the incorporation of stochastic models of human variability, not to predict human action – a fool’s errand – but to define acceptable tolerances within the evaluation framework. A system is only as robust as its ability to account for inherent unpredictability.
Ultimately, the true test of this work will not be in perfecting the robotic proxy, but in revealing the fundamental limitations of augmented reality itself. If ARBot consistently demonstrates the inadequacy of current AR systems to replicate even simple physical interactions, then the platform will have served its purpose, not as a tool for optimization, but as a precise instrument for exposing the boundaries of what is presently achievable.
Original article: https://arxiv.org/pdf/2602.06273.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-09 12:13