Author: Denis Avetisyan
New research uses detailed movement analysis to understand how people adjust their walking speed when encountering autonomous vehicles.
![A spatial choice grid defines the available movement options for each pedestrian at a given time step, [latex] P_{nt} [/latex], enabling the system to model pedestrian navigation through discrete spatial possibilities.](https://arxiv.org/html/2602.05142v1/grid_def.jpg)
A hybrid discrete choice model is employed to analyze pedestrian trajectory data and identify key factors influencing behavior during encounters with autonomous vehicles.
Predicting pedestrian responses to approaching autonomous vehicles remains a critical challenge for ensuring safe mixed-traffic environments. This is addressed in ‘Modelling Pedestrian Behaviour in Autonomous Vehicle Encounters Using Naturalistic Dataset’, which investigates micro-level movement adjustments using a hybrid discrete choice model and the NuScenes dataset. The analysis reveals that factors like directional collision risk proximity and remaining distance significantly influence pedestrian behaviour, demonstrating asymmetries in risk perception and potential mid-crossing thresholds. How can these nuanced behavioural patterns be effectively integrated into autonomous vehicle planning algorithms to anticipate and mitigate potential conflicts?
Understanding the Nuances of Pedestrian Behavior
The safe deployment of autonomous vehicles hinges on a vehicle’s ability to anticipate the actions of pedestrians, a task proving remarkably difficult with existing technologies. Current predictive models, frequently relying on statistical approaches like Logistic Regression, often fail to account for the subtle cues and complex cognitive processes influencing pedestrian behavior. These models tend to treat pedestrian movement as largely predictable, neglecting factors such as momentary distractions, social interactions, or varying risk tolerance. Consequently, autonomous systems struggle to accurately assess the likelihood of a pedestrian crossing, stepping into the roadway, or otherwise creating a potentially hazardous situation, necessitating more sophisticated approaches that move beyond simple statistical correlations and embrace a more nuanced understanding of human decision-making in dynamic environments.
Current predictive models for pedestrian behavior, such as Logistic Regression and Multinomial Logit, often prove inadequate due to their reliance on static probabilities and limited ability to account for the continuous, context-dependent nature of human decision-making. These models typically treat pedestrian actions as discrete choices based on a fixed set of variables, failing to capture the subtle influences of factors like gaze direction, body language, or momentary distractions. Unlike the simplified assumptions of these statistical approaches, pedestrians don’t simply choose to cross – or not cross – a street; they continuously assess risk, adjust their speed, and react to changing circumstances in a highly dynamic process. Consequently, these established methods struggle to predict the complex interplay between a pedestrian’s perception of an approaching vehicle and their ultimate decision, hindering the development of truly safe autonomous systems.
Assessing pedestrian risk isn’t simply about calculating proximity or speed; it demands a detailed understanding of how individuals perceive approaching vehicles and modulate their responses accordingly. Research indicates pedestrians don’t react uniformly to traffic; instead, they continuously evaluate factors like vehicle speed, distance, trajectory, and even subtle cues like driver gaze. This perception-action cycle involves a complex interplay of visual processing, cognitive assessment of threat, and motor planning for evasive maneuvers – or, crucially, the decision to proceed. Consequently, accurate risk evaluation necessitates models that move beyond static calculations and incorporate the dynamic, probabilistic nature of human perception and behavioral response to varying levels of perceived threat, acknowledging that a pedestrian’s reaction isn’t a predetermined outcome, but rather a continuously adjusted assessment of risk.
Introducing a Hybrid Approach: ResLogit
ResLogit is a hybrid modeling framework designed to leverage the advantages of both Discrete Choice Models (DCM) and Residual Neural Networks (ResNets). DCMs provide a statistically rigorous approach to understanding decision-making based on observed choices, while ResNets excel at learning complex, nonlinear relationships from data. ResLogit integrates these two approaches by utilizing a ResNet to process input features and generate parameters for a DCM. This allows the model to capture both the structured, choice-based aspects of behavior, as well as the nuanced, potentially unobserved factors influencing those choices. The resulting framework aims to improve predictive accuracy and offer a more comprehensive understanding of complex behavioral patterns compared to using either modeling technique in isolation.
Traditional Discrete Choice Models (DCMs) often assume linear relationships between pedestrian characteristics and their path selection. However, pedestrian behavior is inherently nonlinear; factors such as route familiarity, crowding, and individual risk tolerance introduce complexities not captured by linear models. ResLogit addresses this limitation by incorporating Residual Neural Networks, which are capable of approximating complex, nonlinear functions. This allows the model to represent pedestrian decision-making with greater fidelity, accurately reflecting how subtle changes in environmental factors or individual attributes can lead to disproportionate shifts in route choice probabilities. The ability to model these nonlinearities results in improved predictive accuracy compared to standard DCMs, particularly in scenarios involving diverse pedestrian populations and complex environments.
ResLogit addresses unobserved heterogeneity in pedestrian behavior by incorporating Residual Neural Networks (ResNets) as a component of the model. Traditional Discrete Choice Models (DCMs) assume homogeneity or rely on explicitly modeled observed characteristics to account for preference variations. ResNets, however, learn complex, nonlinear representations directly from the data, effectively capturing individual differences in pedestrian reactions and preferences that are not directly measurable or included as input features. This allows ResLogit to estimate a distribution of parameters, reflecting the diversity of pedestrian responses to the same stimuli, and thereby improve the accuracy of predicting individual-level behavior without requiring explicit specification of all contributing factors.
Data-Driven Insights into Perceived Risk
Vehicle trajectories were estimated using the NuScenes dataset, a publicly available resource containing data collected from a fleet of autonomous vehicles operating in Boston and Singapore. This dataset provides synchronized data from six cameras, five radars, and one LiDAR, enabling the reconstruction of 3D bounding boxes for all tracked agents – vehicles, pedestrians, cyclists, and others – over time. We leveraged this data to predict future vehicle positions, forming the basis for assessing potential risks to pedestrians. The dataset’s comprehensive sensor suite and detailed annotations allowed for accurate trajectory estimation and subsequent risk assessment calculations, providing a robust foundation for analyzing pedestrian-vehicle interactions in complex urban environments.
Collision Risk Proximity (CRP) was utilized as a key metric for quantifying pedestrian risk, representing a composite assessment of potential collision severity and immediacy. CRP integrates two primary components: Frontal and Rear Collision Intensity, which assesses the potential energy of an impact based on vehicle mass and relative velocity; and Closing Time-to-Collision (CTTC), calculated as the time remaining until a potential collision assuming current velocities are maintained. These components are combined to provide a single, scalar value representing the overall risk level, allowing for a nuanced evaluation beyond simple distance-based thresholds. The calculation considers the vehicle’s approach direction relative to the pedestrian, differentiating between frontal and rear impact scenarios and weighting the risk accordingly.
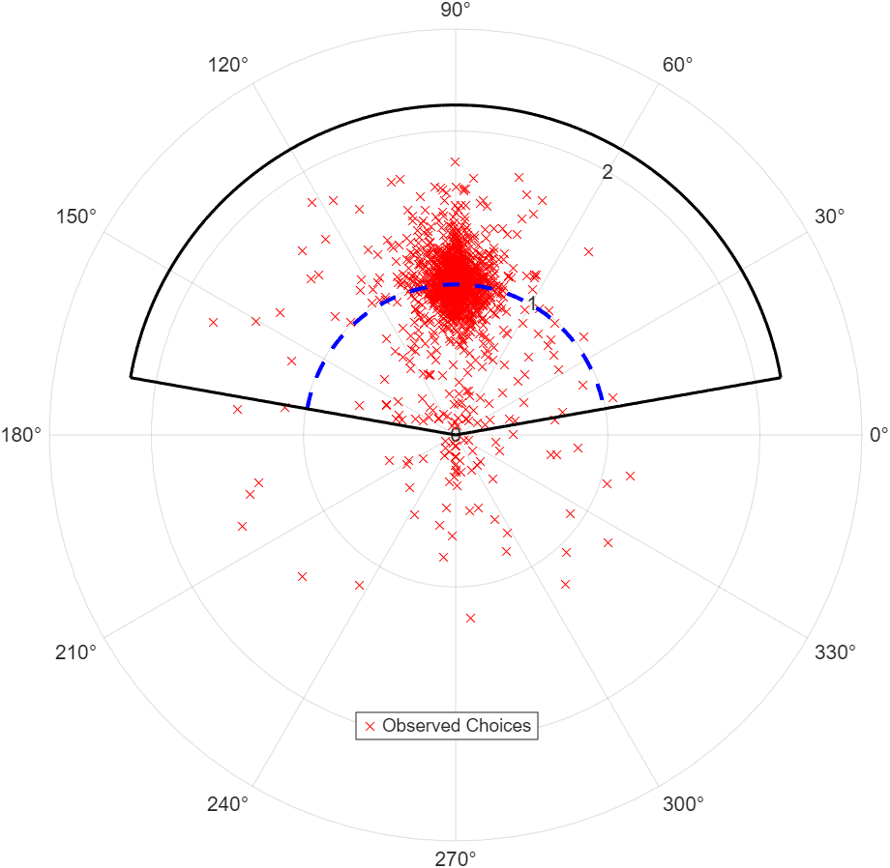
Analysis of 1875 pedestrian movement choices, derived from a dataset of 1312 training observations and validated with 563, demonstrates dynamic behavioral adaptation. These choices were categorized as either decelerations (938 instances) or accelerations (937 instances) and correlated with influencing factors. Specifically, pedestrian adjustments were found to be responsive to both Relative Speed between the pedestrian and approaching vehicles, and Visual Looming – the rate of angular size increase of the vehicle in the pedestrian’s field of view. This indicates pedestrians do not maintain a static response to potential collisions, but rather modify their movement based on perceived threat levels indicated by these two key variables.
![The directional visual risk surface, calculated as [latex] ext{Intensity}/(1+ ext{CTTC})[/latex], demonstrates how risk varies with collision angle intensity and time-to-collision (CTTC).](https://arxiv.org/html/2602.05142v1/Picture2.png)
Towards Safer Autonomous Systems: Implications for the Future
The development of ResLogit represents a measurable step towards enhancing the safety of autonomous vehicles through improved pedestrian behavior prediction. Achieving a predictive accuracy of 0.58, while moderate, signifies a considerable advancement over existing models, offering a more reliable basis for anticipating pedestrian actions in complex scenarios. This increased accuracy isn’t simply a statistical improvement; it directly impacts the vehicle’s ability to make informed decisions, such as adjusting speed or trajectory to avoid potential collisions. By more accurately forecasting where a pedestrian might move, autonomous systems can transition from reactive responses to proactive safety measures, potentially mitigating risks before they fully materialize and paving the way for more trustworthy self-driving technology.
Autonomous vehicle safety hinges on the ability to not only detect pedestrians, but to accurately foresee their actions. Current systems often struggle with the subtleties of human behavior, failing to account for an individual’s assessment of risk. This research demonstrates that incorporating nuanced risk perception into autonomous systems enables proactive responses to pedestrian movements. By modeling how a pedestrian weighs potential hazards – considering factors like speed, distance, and surrounding traffic – vehicles can move beyond reactive braking and instead anticipate likely trajectories. This predictive capability allows for smoother, more confident navigation, reducing the potential for collisions and fostering greater trust in autonomous technology. Ultimately, a system that ‘understands’ a pedestrian’s risk assessment is poised to be significantly safer and more effective in complex urban environments.
The development of truly autonomous vehicles hinges on the ability to not just detect pedestrians, but to accurately anticipate their movements. This research offers a foundational framework for achieving this, moving beyond simple bounding box detection to a system capable of modeling pedestrian behavior with greater fidelity. By incorporating principles of risk assessment and nuanced behavioral modeling, the ResLogit approach provides a blueprint for building more robust prediction algorithms. This framework isn’t limited to a specific sensor suite or environmental condition; rather, it offers adaptable methodology applicable to diverse datasets and real-world scenarios, ultimately paving the way for safer and more reliable autonomous navigation systems capable of navigating complex pedestrian environments.
The study meticulously details pedestrian micro-movements-subtle adjustments in speed and trajectory-as autonomous vehicles approach. This focus on granular behavioral data resonates with a core principle of understanding complex systems: seemingly small actions can have significant, cascading effects. As Richard Feynman observed, “The difficulty lies not so much in developing new ideas as in escaping from old ones.” The researchers demonstrate this by moving beyond simplistic assumptions of pedestrian behavior and embracing the nuance revealed through detailed trajectory analysis. This approach acknowledges that predicting interactions requires abandoning preconceived notions and observing the reality of how individuals respond to dynamic, potentially risky situations, ultimately bolstering the safety and predictability of autonomous vehicle encounters.
Beyond Prediction: Charting a Course for Ethical Interaction
The capacity to model pedestrian behaviour around autonomous vehicles, as demonstrated by this work, represents a technical achievement. However, the focus on predicting micro-movements risks obscuring a more fundamental question: what constitutes a just interaction? The model identifies factors influencing pedestrian speed adjustments, yet it does not inherently account for power imbalances-the inherent vulnerability of a pedestrian facing a multi-ton vehicle. Data itself is neutral, but models reflect human bias, and this one, like many, prioritizes efficiency over equity.
Future research must move beyond simply anticipating pedestrian actions. A critical next step involves incorporating ethical constraints directly into the predictive framework. This means exploring how to model not only what a pedestrian might do, but what an autonomous vehicle should do, given principles of safety, fairness, and respect. Spatiotemporal indicators are useful, but they are insufficient to capture the nuances of human agency and the moral implications of automated decision-making.
Ultimately, tools without values are weapons. The field must confront the fact that increasingly accurate models of pedestrian behaviour do not automatically translate into safer or more ethical autonomous systems. The true challenge lies not in perfecting prediction, but in designing vehicles that deserve to share the road.
Original article: https://arxiv.org/pdf/2602.05142.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-08 20:49