Author: Denis Avetisyan
A new communication framework leverages the power of large language models to enable more effective teamwork between robotic agents.
This paper introduces CommCP, a system that uses conformal prediction to calibrate language model outputs for robust and reliable multi-agent coordination in embodied question answering and robotic tasks.
Coordinating multiple robots to complete complex tasks requires not only specialized manipulation skills but also effective information exchange, often hindered by unreliable communication. To address this challenge, we introduce ‘CommCP: Efficient Multi-Agent Coordination via LLM-Based Communication with Conformal Prediction’, a novel framework leveraging large language models for decentralized, cooperative task completion. Our approach enhances communication reliability by calibrating LLM-generated messages using conformal prediction, minimizing distractions and improving overall coordination. Does this calibration technique represent a crucial step towards truly robust and scalable multi-agent robotic systems operating in dynamic, real-world environments?
The Challenge of Scalable Collaborative Reasoning
Current methods in Embodied Question Answering (EQA) face considerable hurdles as complexity increases, particularly when transitioning from single-agent tasks to scenarios involving multiple agents and diverse objectives. These traditional approaches often rely on exhaustive search and reinforcement learning techniques, demanding exponentially greater computational power as the number of agents, potential actions, and task variations grow. The sheer scale of these multi-agent, multi-task environments quickly overwhelms existing algorithms, hindering real-time performance and practical deployment. This limitation stems from the difficulty in coordinating actions and efficiently exploring the vast state-action space, making scalable and resource-efficient solutions a critical area of ongoing research.
Truly collaborative problem-solving amongst embodied agents demands more than simply perceiving the environment and executing actions; it hinges on the robust exchange of information and underlying intent. An agent’s actions, devoid of communicated rationale, can be misinterpreted, leading to inefficient or even conflicting behavior within a multi-agent system. Therefore, research focuses on developing communication protocols that allow agents to not only share what they are doing, but also why, potentially utilizing symbolic representations or learned communication languages. This enables a recipient agent to anticipate actions, infer goals, and coordinate effectively, significantly enhancing performance in complex, multi-task environments and moving beyond simple reactive behaviors towards genuine teamwork.

CommCP: A Framework for Calibrated Multi-Agent Communication
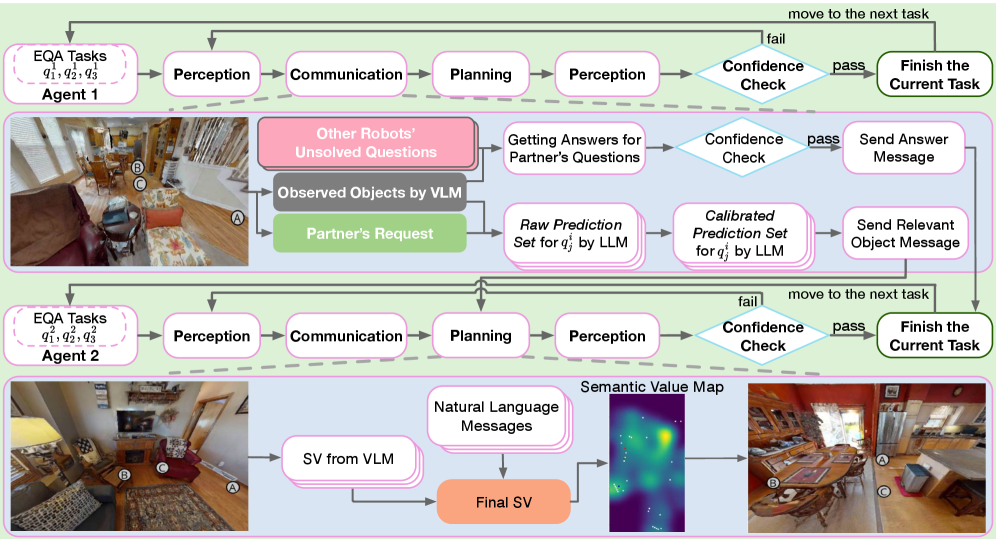
CommCP utilizes Large Language Models (LLMs) for inter-agent communication, but addresses the inherent uncertainty of LLM outputs by integrating Conformal Prediction. This statistical technique provides calibrated confidence scores for each communicated message, quantifying the reliability of the information being shared. Specifically, Conformal Prediction generates prediction intervals, allowing receiving agents to assess the validity of a statement with a pre-defined error rate. This calibration is crucial in multi-agent systems, enabling agents to discern trustworthy information from potentially inaccurate LLM-generated content and adjust their actions accordingly, ultimately improving collaborative task performance and system robustness.
The CommCP framework utilizes a Semantic Value Map (SVM) to facilitate a shared environmental representation among agents. This SVM encodes the perceived environment as a structured dataset, allowing agents to reason about object properties, spatial relationships, and task-relevant features. Perception is achieved through a Visual Language Model (VLM), which processes visual input to extract semantic information and translate it into a language-based format compatible with the SVM. By combining VLM-derived perceptions with the SVM, agents can collaboratively build and maintain a consistent understanding of the environment, crucial for coordinated action and effective task completion in multi-agent systems.
The CommCP framework utilizes LLaMA3-8B-instruct for high-quality reasoning and response generation during communication between agents. This LLM processes information and formulates messages to be shared. Complementing this is Prismatic-VLM-13B, a Visual Language Model responsible for interpreting visual inputs from the environment. Prismatic-VLM-13B extracts relevant information from images and translates it into a language understandable by LLaMA3-8B-instruct, enabling agents to perceive and react to their surroundings. The combined capabilities of these models are essential for both understanding the task requirements and successfully executing the Environment Question Answering (EQA) process.
Empirical Validation in Complex 3D Environments
CommCP was evaluated using the Habitat-Matterport 3D (HM3D) Dataset, a widely adopted benchmark for research in 3D environmental understanding and agent navigation. HM3D provides high-fidelity, photorealistic reconstructions of real-world indoor spaces, offering a complex and realistic environment for testing algorithms. The dataset includes a variety of scenes with varying layouts, object densities, and lighting conditions, posing significant challenges for agents tasked with perception, mapping, and navigation. Utilizing HM3D allows for standardized evaluation and comparison of CommCP’s performance against other state-of-the-art methods in a controlled, reproducible manner.
Within the Habitat-Matterport 3D (HM3D) environment, CommCP demonstrated a success rate of 0.68 when performing Embodied Question Answering (EQA) tasks with multiple agents operating concurrently. This performance metric represents the proportion of trials where all agents successfully completed their assigned EQA objectives. Comparative analysis against baseline methods, specifically MMEuC (operating with independent agents) and MMFBE (utilizing a Frontier-Based Exploration strategy), indicates CommCP’s consistent advantage in achieving successful multi-agent, multi-task EQA outcomes within the HM3D dataset.
CommCP achieved a Normalized Time Cost (NTC) of 0.4 during evaluation within the HM3D dataset. This represents a significant improvement in efficiency compared to baseline methods, which exhibited an NTC of 0.8 while maintaining a comparable success rate of 0.65. The NTC metric quantifies the time required to complete tasks normalized by the optimal path length, thereby indicating CommCP’s ability to complete tasks more quickly and with reduced computational expense relative to existing approaches.
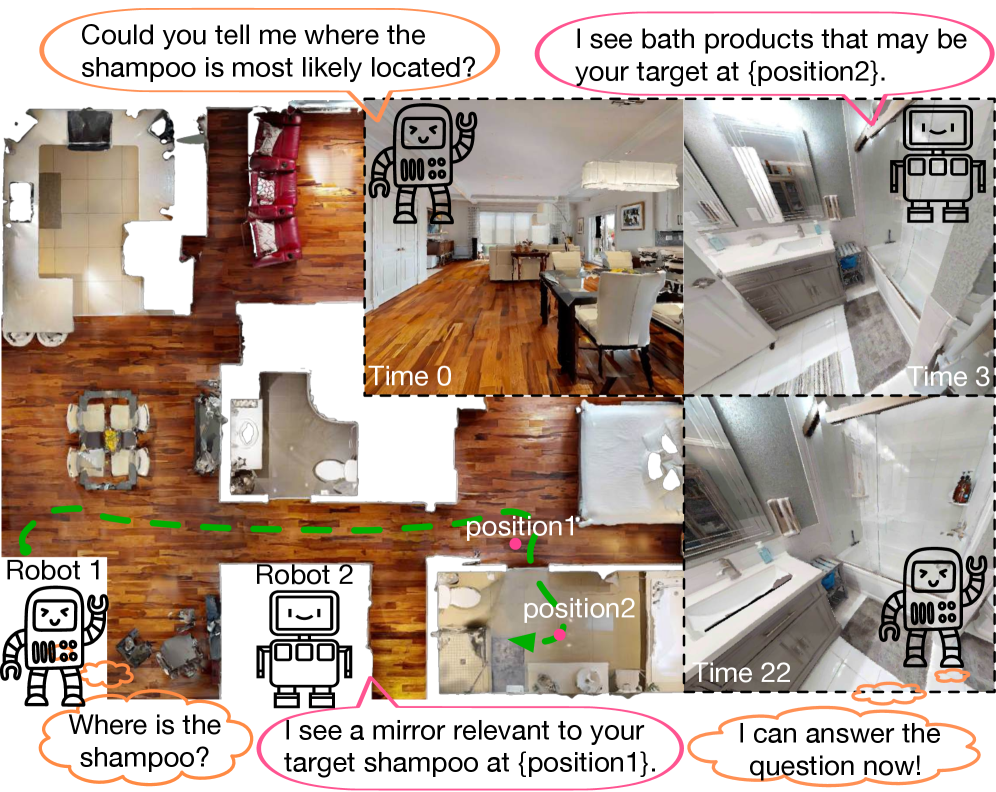
![Using collaborative exploration, the proposed method-where Robot2 shares observations like potential target locations ([latex]position_1[/latex]-[latex]position_4[/latex]) regarding a red bear cushion-enables Robot1 to effectively locate the target, as demonstrated by the alignment of robot and global views.](https://arxiv.org/html/2602.06038v1/x4.png)
Implications for Robust Multi-Agent Systems and Future Directions
The demonstrable success of the Communication and Coordination Protocol (CommCP) underscores a fundamental principle in multi-agent systems: effective collaboration hinges on calibrated communication. This isn’t simply about agents exchanging data, but rather ensuring information is not only accurately transmitted but also appropriately weighted and understood within the context of the task at hand. CommCP’s architecture prioritizes reliable information sharing, allowing agents to build a shared understanding of the environment and their respective roles, which directly translates to improved performance in complex scenarios. The framework’s efficacy suggests that investing in robust communication protocols is paramount when designing systems where multiple agents must work in concert, as even minor miscommunications can propagate into significant errors and hinder overall success.
The principles underpinning CommCP, a system designed for reliable multi-agent communication, possess broad applicability beyond its initial implementation. The framework’s emphasis on calibrated information exchange and robust coordination strategies readily translates to scenarios demanding complex teamwork, such as coordinating search and rescue efforts in disaster zones. Similarly, collaborative robotics, where multiple robots must work in unison to achieve a common goal – be it assembly, exploration, or construction – stands to benefit from CommCP’s approach to minimizing miscommunication and maximizing efficiency. Furthermore, environmental monitoring, involving the coordinated deployment of sensors and autonomous vehicles to gather data across vast areas, could leverage this framework to ensure comprehensive coverage and accurate data synthesis, ultimately enhancing the ability to model and respond to dynamic environmental changes.
Ongoing development of CommCP prioritizes increasing its operational capacity within unpredictable settings, acknowledging that real-world scenarios rarely remain static. Researchers are actively investigating techniques to allow the system to dynamically adjust communication strategies in response to changing conditions, such as varying agent numbers, environmental obstacles, or unexpected events. A key avenue of exploration involves machine learning approaches, aiming to enable CommCP to autonomously discover optimal communication protocols directly from collected data, rather than relying on pre-programmed rules. This data-driven approach promises not only enhanced robustness but also the potential for CommCP to generalize its collaborative abilities to entirely new tasks and agent types, significantly broadening its applicability beyond the initial design parameters.
The pursuit of robust multi-agent systems, as detailed in this work, demands a precision exceeding mere empirical success. The framework’s integration of conformal prediction directly addresses the inherent uncertainty within large language model communications, ensuring a calibrated exchange of information critical for coordinated action. This echoes Linus Torvalds’ sentiment: “Most good programmers do programming as a hobby, and very few of them do it professionally.” The elegance lies not just in making the system work-achieving task success-but in rigorously establishing the correctness of its reasoning, much like a mathematician proving a theorem. The system’s reliance on provable calibration, rather than simply observed performance, exemplifies this ideal.
Future Directions
The pursuit of coordinated multi-agent systems, as demonstrated by this work, frequently resembles an exercise in applied pragmatism rather than rigorous science. While the integration of large language models offers a seductive pathway to emergent cooperation, the inherent stochasticity of these models demands careful consideration. The application of conformal prediction represents a commendable attempt to introduce statistical calibration, yet it merely addresses the symptoms of uncertainty, not the fundamental lack of provable guarantees. Future research must move beyond empirical validation and focus on establishing formal bounds on the reliability of LLM-mediated communication.
A critical limitation lies in the assumption that ‘truth’ can be adequately represented as a token sequence. The real world is rarely so accommodating. Subsequent efforts should investigate methods for grounding LLM outputs in sensory data and physical constraints, moving toward a system where communication is anchored in verifiable states. Moreover, the scalability of conformal prediction itself remains an open question, particularly as the number of agents and the complexity of the environment increase.
Ultimately, the field risks becoming enamored with demonstrable performance at the expense of theoretical understanding. Optimization without analysis is self-deception. The true measure of success will not be achieving higher task completion rates, but rather establishing a mathematical framework for reasoning about the correctness and robustness of cooperative behavior in complex, uncertain environments.
Original article: https://arxiv.org/pdf/2602.06038.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-07 09:33