Author: Denis Avetisyan
A new framework allows robots to navigate crowded environments by predicting pedestrian movement and aligning with natural flow.
![The autonomous system demonstrates graceful navigation within a dense pedestrian environment by aligning with prevailing flow-initially tracking forward movement and subsequently adapting to avoid opposing groups-achieving continued, safe progress as evidenced by its trajectory between [latex]t=4[/latex] and [latex]t=17[/latex].](https://arxiv.org/html/2602.05608v1/figure/robot_poster_image.png)
HiCrowd leverages hierarchical reinforcement learning and model predictive control to enable safe and efficient robot navigation within dense human environments by predicting follow points aligned with crowd flow.
Navigating dense human crowds presents a persistent challenge for mobile robots, often leading to inefficient or stalled behaviors. This paper introduces HiCrowd: Hierarchical Crowd Flow Alignment for Dense Human Environments, a novel framework that addresses this issue by explicitly aligning the robot’s motion with prevailing pedestrian flows. HiCrowd leverages a hierarchical reinforcement learning and model predictive control approach to predict a ‘follow point’ guiding the robot to safely navigate alongside compatible groups. Could this principle of proactive flow alignment unlock more natural and efficient human-robot interactions in increasingly crowded public spaces?
The Inevitable Dance: Navigating the Complexity of Human Space
Successfully maneuvering through bustling pedestrian spaces presents a formidable hurdle for robotic navigation systems. Unlike controlled factory floors or clearly marked roadways, sidewalks and plazas are characterized by unpredictable human movements, varying speeds, and frequent changes in direction. This demands more than simply avoiding static obstacles; a robot must constantly anticipate potential collisions, adjust its trajectory in real-time, and prioritize the safety of those around it. Adaptability is paramount, requiring sophisticated algorithms capable of interpreting subtle cues in human behavior – a glance, a shift in weight, or a change in pace – to accurately predict future paths. Consequently, the development of robust navigation strategies for dense pedestrian environments remains a critical area of research, pushing the boundaries of robotics and artificial intelligence.
Conventional robotic navigation systems, designed for static environments, frequently falter when confronted with the unpredictability of human movement. These systems often rely on pre-programmed paths and rule-based obstacle avoidance, proving inadequate for dynamic settings where pedestrians exhibit variable speeds, change direction abruptly, and engage in complex social interactions. Consequently, robots struggle to accurately anticipate human trajectories, leading to hesitant movements, frequent stops, and a heightened risk of collisions. The core difficulty lies in modeling the inherent stochasticity of human behavior – pedestrians don’t follow predictable patterns like manufactured objects, necessitating more sophisticated algorithms that incorporate probabilistic models and real-time behavioral analysis to ensure safe and efficient navigation within crowded spaces.
The tendency for robots to become immobilized in crowded spaces – often termed the ‘Freezing Robot Problem’ – stems from an overreliance on pre-programmed trajectories and an inability to rapidly assess and respond to unpredictable human movements. Unlike humans, who intuitively anticipate and negotiate paths through dense environments, robots frequently encounter scenarios where even minor deviations in pedestrian flow trigger halting behavior or complete standstill. This isn’t simply a matter of computational power; it reveals a fundamental gap in robotic decision-making, requiring algorithms that prioritize fluid adaptation over rigid adherence to planned routes. Consequently, research focuses on developing reactive strategies – allowing robots to dynamically replan and execute maneuvers based on real-time observations – and incorporating elements of social awareness, enabling them to predict and accommodate the nuanced behaviors inherent in human crowds, ultimately preventing these costly and potentially dangerous impasses.
Effective navigation within human crowds necessitates a deep understanding of ‘crowd flow’ – not merely as a physical movement, but as a complex interplay of social behaviors and predictive modeling. Researchers are increasingly focusing on algorithms that move beyond simple obstacle avoidance, instead attempting to anticipate pedestrian trajectories based on observed patterns, social norms, and even subtle cues like gaze direction or body language. This involves characterizing crowd dynamics as a fluid – analyzing density, velocity, and pressure – while also incorporating game-theoretic approaches to model interactions as reciprocal predictions between robot and pedestrian. Ultimately, successful navigation isn’t about avoiding people, but seamlessly integrating into the flow, requiring robots to demonstrate an awareness of social etiquette and a capacity to negotiate shared spaces with predictable and trustworthy movements.
Hierarchical Intelligence: Orchestrating Movement Within the Current
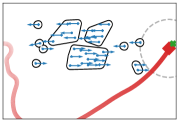
HiCrowd employs a hierarchical control architecture integrating Reinforcement Learning (RL) and Model Predictive Control (MPC) to address the challenges of navigation in crowded environments. The RL component learns a high-level policy for selecting ‘Follow Points’ – desired locations within pedestrian groups – based on observed crowd behavior and the robot’s navigation goals. These Follow Points then serve as setpoints for the MPC layer, which computes a dynamically feasible trajectory that minimizes cost while adhering to robot kinematics and collision avoidance constraints. This division of labor allows the RL policy to focus on strategic, long-term decision-making, while MPC handles the precise, real-time control required for safe and efficient execution, capitalizing on the strengths of both approaches.
The HiCrowd system employs a ‘Follow Point’ as an intermediate navigation target determined by a Reinforcement Learning (RL) policy. This policy analyzes the surrounding pedestrian environment and generates coordinates representing a desired location within a suitable pedestrian group. Rather than directly navigating to the goal, the robot first attempts to reach this dynamically generated Follow Point. The RL policy is trained to select Follow Points that maximize progress towards the ultimate goal while minimizing collision risk and respecting pedestrian social norms. This indirection allows the robot to proactively position itself within the flow of pedestrians, facilitating smoother and more efficient navigation compared to reactive obstacle avoidance strategies.
HiCrowd’s ability to anticipate pedestrian movements is achieved through the combined use of Reinforcement Learning (RL) and Model Predictive Control (MPC). The RL component learns to predict likely pedestrian group behaviors, providing a probabilistic understanding of future locations. This prediction data is then fed into the MPC module, which uses a dynamic model of the environment – including predicted pedestrian trajectories – to plan a trajectory for the robot. The MPC optimizes this trajectory not only for efficiency and goal achievement, but also to maintain a safe distance from predicted pedestrian locations, effectively allowing the robot to proactively avoid potential collisions and navigate crowded spaces with increased safety and fluidity.
Traditional robotic navigation systems often rely on reactive approaches, responding to obstacles as they are detected, which limits speed and introduces jerky movements. HiCrowd distinguishes itself by enabling proactive navigation; the system anticipates potential pedestrian movements based on group dynamics and utilizes this prediction to plan trajectories before obstacles necessitate a reaction. This predictive capability allows the robot to maintain a consistent velocity and select smoother, more comfortable paths. Consequently, HiCrowd not only improves navigation speed by minimizing the need for abrupt course corrections, but also enhances passenger comfort through the reduction of unnecessary acceleration and deceleration events.
[/latex] based on sensed humans and the robot's state to guide its movement, which is then precisely executed by a model predictive control (MPC) controller prioritizing collision avoidance and dynamic feasibility, and the policy is refined using a reward function combining goal achievement, progress, and crowd alignment.](https://arxiv.org/html/2602.05608v1/x1.png)
Validation Through Observation: Assessing Resilience in Complex Systems
HiCrowd’s generalizability was assessed through evaluation on two distinct datasets: a synthetically generated dataset and the established ETH-UCY dataset. The synthetic dataset allowed for controlled experimentation and validation of core algorithmic functionality, while the ETH-UCY dataset, comprising real-world pedestrian trajectories, provided a benchmark against existing methods and demonstrated performance in complex, naturally occurring crowd dynamics. Utilizing both datasets ensured a comprehensive evaluation, confirming the algorithm’s ability to perform reliably across varied data distributions and scenarios.
HiCrowd’s performance evaluation encompassed both offline and online settings to assess its adaptability. Offline testing utilized pre-recorded datasets for controlled analysis, while the online setting involved real-time interaction with a simulated environment. This was achieved through integration with ORCA (Optimal Reciprocal Collision Avoidance), a widely used reactive pedestrian simulation framework. ORCA allowed HiCrowd to dynamically respond to the movements of simulated pedestrians, enabling assessment of its collision avoidance and path planning capabilities in a more realistic and interactive scenario. This dual-setting approach provided a comprehensive understanding of HiCrowd’s robustness and its ability to function effectively in both static and dynamic crowd environments.
Evaluations of the HiCrowd algorithm, conducted using both synthetic and established datasets (ETH-UCY), consistently demonstrated substantial improvements in performance metrics when compared to baseline methods. Specifically, experiments achieved a 100% Success Rate across all tested scenarios, indicating the algorithm’s reliable ability to navigate and manage pedestrian flow. This success rate was observed in both offline analysis and online simulations utilizing the ORCA reactive pedestrian simulator, validating the algorithm’s robustness in diverse operational settings. The consistent achievement of a perfect success rate signifies a marked advancement in crowd management technology.
The HiCrowd algorithm leverages DBSCAN for density-based spatial clustering of pedestrian locations, enabling it to discern crowd formations and trajectories. This is coupled with a Gumbel Social Transformer network, which models pedestrian interactions and predicts future movements based on observed social behaviors. The combined approach facilitates a more nuanced understanding of crowd flow, allowing HiCrowd to anticipate and react to pedestrian dynamics with greater accuracy. Consequently, experiments across both synthetic and real-world datasets – including the ETH-UCY dataset – consistently demonstrated the lowest freezing frequency compared to baseline methods, indicating improved robustness and reduced instances of the algorithm failing to generate valid trajectories.
Beyond Utility: Towards Harmonious Integration Within Shared Spaces
The development of truly effective robots for human spaces requires more than just obstacle avoidance; it demands social compliance – the ability to navigate while respecting unwritten social rules. HiCrowd addresses this challenge by creating a system where robots learn to anticipate pedestrian behavior and adjust their movements accordingly, mirroring human navigational tendencies. This isn’t simply about predicting where someone will walk, but understanding how they expect to be passed, the comfortable distances maintained, and the subtle cues indicating intent. By incorporating these socially-aware algorithms, HiCrowd moves robotics beyond purely functional navigation, paving the way for robots that feel less intrusive and more collaborative within shared environments.
To facilitate truly natural interaction, robotic navigation extends beyond obstacle avoidance and incorporates nuanced social understanding through techniques like ‘Socially Aware Reinforcement Learning’ (SARL) and ‘CrowdAttention’ (CrowdAttn). SARL enables robots to learn optimal navigation strategies not just for efficiency, but also to minimize social disruption – effectively ‘reading the room’ and anticipating human movements. Complementing this, CrowdAttn focuses the robot’s perception on salient social cues within a crowd, allowing it to prioritize interactions with individuals who are directly impacted by its path. These methods, operating in tandem, allow a robot to interpret subtle signals like gaze direction, body language, and proximity, enabling it to adjust its trajectory and behavior to align with accepted social norms and ensure a comfortable experience for those nearby.
The advent of socially compliant robotics promises transformative changes across diverse sectors. In logistics, robots navigating warehouses and delivery routes will seamlessly collaborate with human workers, increasing efficiency and safety. Healthcare stands to benefit from robotic assistants capable of moving through hospitals and assisting patients with greater sensitivity and reduced disruption. Perhaps most critically, public safety applications envision robots operating effectively in crowded environments during emergencies, providing support and gathering vital information without exacerbating chaotic situations. This technology isn’t simply about robots avoiding collisions; it’s about fostering trust and enabling productive interaction, ultimately reshaping how robots integrate into the fabric of daily life and contribute to a more responsive and supportive infrastructure.
Ongoing development of the HiCrowd system prioritizes adaptability to increasingly intricate real-world environments, moving beyond simple obstacle avoidance to nuanced interactions within dynamic human spaces. Researchers aim to equip robots with the capacity to not only perceive complex social cues but also to learn and integrate individual user preferences into their navigational strategies. This personalization extends beyond simply avoiding collisions; the system will eventually tailor routes and behaviors based on observed habits, anticipated needs, and even expressed comfort levels, creating a more intuitive and cooperative experience. Such advancements promise a future where robots seamlessly integrate into daily life, functioning not merely as tools, but as considerate and responsive companions in shared spaces.
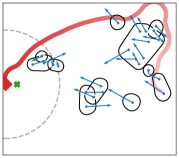
![A differential-drive robot successfully navigates dynamic pedestrian environments-including moving with, against, and across flows of people-by maintaining a [latex]0.5\text{\}\mathrm{m}[/latex] radius around a predefined human offset, as demonstrated in real-world experiments.](https://arxiv.org/html/2602.05608v1/figure/real_world.png)
The presented HiCrowd framework implicitly acknowledges the inevitable entropy inherent in any dynamic system. Just as infrastructure succumbs to erosion over time, so too does the predictable nature of crowd flow. The system attempts to mitigate this decay by anticipating pedestrian movements and aligning with established ‘follow points,’ creating a momentary phase of temporal harmony. This proactive approach, much like preventative maintenance, strives to extend the lifespan of efficient navigation within a complex environment. As Blaise Pascal observed, “All of humanity’s problems stem from man’s inability to sit quietly in a room alone.” The HiCrowd system, in a sense, attempts to engineer a more comfortable ‘room’ within the chaotic flow of humanity, offering a temporary respite from unpredictable interactions, and extending the time before the system’s graceful degradation.
What Lies Ahead?
The pursuit of efficient navigation within dense human environments, as exemplified by frameworks like HiCrowd, inevitably encounters the limitations inherent in predicting complex systems. The elegance of aligning with emergent crowd flow offers a temporary reprieve from exhaustive individual trajectory prediction, but it doesn’t negate the fundamental uncertainty. Systems learn to age gracefully; they don’t necessarily become impervious to chaos. The true challenge isn’t merely reaching a destination, but understanding when intervention to optimize speed becomes counterproductive-when forcing a solution accelerates the inevitable decay of predictability.
Future iterations will likely focus on refining the balance between proactive path planning and reactive flow alignment. However, a potentially more fruitful avenue lies in accepting a degree of inherent unpredictability. Perhaps the goal shouldn’t be to eliminate deviations caused by pedestrian behavior, but to build systems resilient enough to absorb them. This requires a shift in perspective-away from precise control and toward robust adaptation.
Sometimes observing the process-cataloging the subtle failures and emergent behaviors-is better than trying to speed it up. The value may not lie in achieving optimal navigation, but in developing a deeper understanding of how collective behavior degrades predictability-and, consequently, how systems must adapt to survive within it.
Original article: https://arxiv.org/pdf/2602.05608.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-06 22:04