Author: Denis Avetisyan
As supernumerary robotic limbs move closer to everyday use, establishing clear spatial boundaries is critical for safe, intuitive, and comfortable human-robot interaction.
This review outlines user-defined spatial guidelines and autonomy levels-varying by body zone-to enhance trust, safety, and embodiment when integrating extra robotic limbs.
While advancements in wearable robotics promise enhanced human capability, integrating supernumerary limbs into intimate personal space presents unique challenges to user trust and safety. This research, detailed in ‘SRL Proxemics: Spatial Guidelines for Supernumerary Robotic Limbs in Near-Body Interactions’, investigates how users perceive and coordinate with such limbs during collaborative tasks. Findings from a Wizard-of-Oz study reveal that spatially-defined zones and segment-level autonomy-rather than simply increasing overall robotic independence-are critical for fostering a sense of embodiment and perceived safety. How can these insights inform the design of truly intuitive and trustworthy supernumerary limbs that seamlessly extend human capability?
The Illusion of Control: Mapping the Boundaries of Augmented Limb Space
The advent of supernumerary robotic limbs (SRLs) presents a compelling vision of augmented human potential, yet realizing this future demands meticulous attention to user safety and comfort. These external appendages, designed to extend physical capabilities, necessitate a fundamentally new approach to human-machine interaction, moving beyond simple tool use to a symbiotic relationship requiring close physical proximity. Research indicates that successful integration isn’t solely about mechanical precision or force output; it hinges on establishing a seamless, intuitive experience where the SRL anticipates, assists, and avoids causing discomfort or harm. This requires robust sensing capabilities, sophisticated control algorithms, and a deep understanding of human biomechanics to ensure the SRL operates within acceptable physical and psychological boundaries, preventing unintended collisions, strains, or feelings of being constrained – effectively becoming a trusted extension of the user’s own body.
Establishing safe and effective supernumerary robotic limbs (SRLs) demands a nuanced understanding of appropriate autonomy levels, particularly given their intended operation in close physical proximity to humans. Current research highlights the difficulty of granting SRLs enough independent action to be truly useful without simultaneously creating potential hazards through unintended or unpredictable movements. The challenge isn’t merely technical – creating robots that can act independently – but fundamentally concerns the boundaries of acceptable robotic behavior around the human body. Researchers are investigating methods for dynamically adjusting SRL autonomy based on context, user intent, and predicted environmental changes, aiming to strike a balance between assistive capability and fail-safe operation. This necessitates sophisticated sensor integration, predictive algorithms, and robust error handling to ensure the SRL remains a beneficial extension of the user, rather than a source of risk.
Effective integration of supernumerary robotic limbs demands more than just mirroring human kinematics; a critical element lies in establishing defined ‘proxemic’ boundaries for acceptable robotic behavior. These boundaries, analogous to personal space in social interactions, dictate how closely and in what manner an SRL can approach and interact with the user’s body. Research indicates that even predictable, mechanically sound movements can induce discomfort or anxiety if they violate these subconsciously held spatial expectations; a limb moving too close, even if assisting, can be perceived as threatening. Therefore, developers must prioritize not only the precision and power of SRLs but also their awareness of, and adherence to, these proxemic constraints, ensuring movements are not only functionally helpful but also psychologically comfortable for the user, fostering a sense of safety and collaborative embodiment.
Zoning the Body: A Cartography of Acceptable Intervention
The proposed ‘Body Zones’ framework categorizes the human body into three distinct regions – Critical, Supervisory, and Utilitarian – to facilitate nuanced control of Soft Robotic Locomotion (SRL) systems. The Critical Zone encompasses areas where safety is paramount, demanding highly conservative SRL movements to prevent injury or discomfort. The Supervisory Zone includes regions responsible for maintaining posture and balance, requiring precise and coordinated SRL actions. Finally, the Utilitarian Zone, comprising limbs and areas used for task manipulation, permits a wider range of motion and greater SRL freedom to optimize efficiency and dexterity. This zoning approach enables the tailoring of control algorithms to the specific biomechanical requirements and safety considerations of each body region, moving beyond uniform control strategies.
The Critical Zone, encompassing areas vital to immediate physical well-being such as the head, neck, and spinal column, necessitates highly conservative Shared Reality Layer (SRL) movement parameters. This prioritization of safety dictates reduced velocity, acceleration, and range of motion within this zone, even at the expense of task efficiency. Implementation involves stringent collision avoidance algorithms and predictive modeling to preemptively mitigate potential harm. Any SRL-induced movement within the Critical Zone undergoes multiple layers of verification and validation before execution, ensuring minimal risk of discomfort, injury, or disruption to essential physiological functions. This cautious approach is fundamental, as unintended consequences within this zone could result in significant and lasting negative impacts.
The Utilitarian Zone, encompassing areas of the body less sensitive and not directly involved in core functions, facilitates a wider range of Self-Reported Location (SRL) movements. This increased freedom is intended to optimize the speed and efficiency of task completion, as precise positional accuracy within this zone is less critical than in other areas. Consequently, control algorithms governing SRL within the Utilitarian Zone prioritize fluidity and range of motion over absolute positional certainty, accepting a larger margin of error to reduce computational load and response time.
The implementation of a zoned control strategy for Simulated Reflexive Locomotion (SRL) enables differentiated behavioral parameters based on anatomical region. This means control algorithms governing movement speed, range of motion, and permitted actions are dynamically adjusted according to whether the SRL activity occurs within the Critical, Supervisory, or Utilitarian Zone. For example, movements within the Critical Zone – encompassing areas vital to systemic function – are subject to stricter constraints and lower velocities compared to the Utilitarian Zone, where faster, more expansive motions are permissible to facilitate task completion. This regional specificity optimizes both safety and efficiency by aligning control parameters with the functional requirements of each body region.
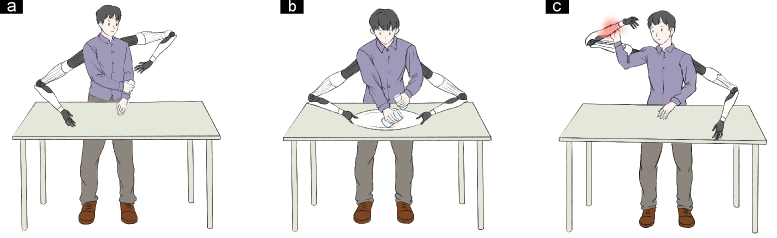
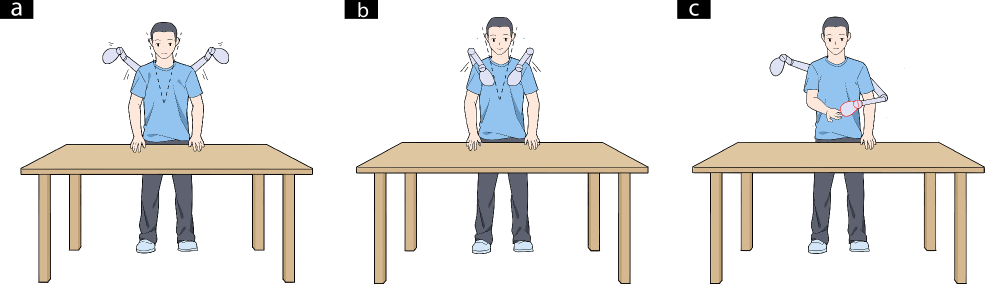
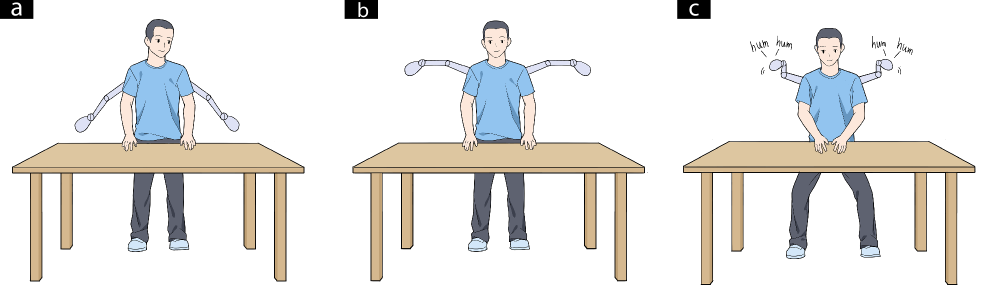
![The experimental setup features comfort zone handovers and deformable object sorting tasks performed with a wearable, backpack-mounted system of articulated, near-body serial robotic links ([latex] SRLs [/latex]) equipped with interchangeable end-effectors.](https://arxiv.org/html/2602.00494v1/x2.png)
The Illusion of Agency: Mapping User Intent Through Responsive Control
Zone-Responsive Control operates by modulating the behavior of a Soft Robotic Leg (SRL) according to its spatial relationship with predefined body zones. This means the SRL’s actions – including speed, force, and trajectory – are not fixed, but are dynamically adjusted based on which zone it is currently interacting with. The system relies on sensors to determine the SRL’s position relative to these zones, allowing for tailored responses designed to optimize comfort and effectiveness. This adaptive behavior distinguishes Zone-Responsive Control from traditional, pre-programmed SRL movements and enables a more nuanced and user-centric interaction.
Research indicates a lateral approach, defined as the Smart Robotic Leg (SRL) initiating movement from a position alongside the user, demonstrably reduces discomfort and increases user acceptance compared to other movement initiation strategies. Data collected through user trials showed a statistically significant preference for the lateral approach, with participants reporting fewer instances of feeling startled or restricted during SRL activation. This preference is attributed to the reduced perception of direct intrusion into personal space, as the lateral movement allows for a more predictable and less abrupt initiation of assistance, thereby promoting a greater sense of control and comfort for the user.
The ‘Wizard-of-Oz’ technique utilized in this research involved simulating fully autonomous Soft Robotic Leg (SRL) behavior through real-time remote control by a human operator. Participants were led to believe the SRL was operating independently, while a hidden operator responded to their movements and adjusted the leg’s actions accordingly. This method allowed researchers to observe user reactions to varying SRL behaviors-such as approach angles and interaction forces-without the limitations of pre-programmed algorithms. The collected data, representing nuanced human responses to perceived SRL autonomy, was then used to inform the development of more effective and user-acceptable control strategies prior to implementation in a fully automated system.
The Wizard-of-Oz technique facilitated the collection of empirical data regarding user responses to varying SRL behaviors in real-time. This involved observing and recording user reactions – including both explicit feedback and subtle physiological cues – as a hidden operator manipulated the SRL’s movements. Collected data encompassed metrics such as perceived comfort levels, acceptance rates of different approach angles, and instances of user intervention or avoidance. Analysis of this data directly informed iterative refinements to the control strategies, allowing researchers to prioritize algorithms and parameters that maximized user comfort and minimized negative reactions prior to implementing fully autonomous operation.
The Promise of Embodiment: When Augmentation Dissolves Into Being
The study demonstrated that allowing individuals to define the operational parameters of a semi-robotic leg – specifically, how it behaves within designated zones – significantly enhanced their feeling of agency over the device. Rather than a pre-programmed response, participants crafted personalized rules governing the leg’s movements, fostering a sense of control and ownership previously absent in systems relying on solely autonomous operation. This ability to tailor the leg’s behavior to individual preferences not only influenced perceived usability but also fundamentally shifted the user experience, creating a more intuitive and comfortable interaction where the device responded in a predictable and personally meaningful way.
The study demonstrated a notable increase in user trust when a semi-autonomous robotic system operated under participant-defined rules, coupled with a foundational level of independent action-referred to as a ‘High-Autonomy Anchor’. Quantitative analysis revealed a mean trust score of 5.42 for this personalized approach, a statistically significant improvement over the 4.18 score observed when the system operated solely with high autonomy [latex](p < .05)[/latex]. This suggests that allowing users to shape the system’s behavior, while still maintaining a base level of functionality, fosters a greater sense of confidence and predictability, ultimately leading to increased acceptance and a more positive user experience.
Objective physiological data further substantiated the benefits of participant-defined rules within the shared robotic learning (SRL) system. Analysis of skin conductance response – a measure of emotional arousal – revealed significantly lower values during the approach and entry phases when users had customized the robot’s behavior. This indicates a demonstrable reduction in stress and anxiety, suggesting that personalization fosters a greater sense of comfort and psychological safety. The observed decrease in arousal levels provides compelling evidence that allowing users to define operational parameters doesn’t merely improve reported trust, but actively reduces the physiological indicators of discomfort associated with interacting with an autonomous system.
Analysis revealed a substantial decrease in feelings of distrust when individuals were given the opportunity to define the operational rules governing the semi-robotic leg (SRL). Specifically, participants exhibited a distrust score of 2.06 when utilizing participant-defined rules, a marked reduction compared to the 2.96 score registered under conditions of high autonomy, where the SRL operated with pre-programmed behaviors. This statistically significant difference – with a p-value of less than 0.05 – suggests that granting users control over the SRL’s behavior directly addresses concerns about unpredictable or unwanted movements, fostering a greater sense of safety and security during ambulation. The ability to personalize the system, therefore, appears crucial in mitigating negative perceptions and establishing a more comfortable, confident user experience.
The study suggests that tailoring a semi-autonomous robotic limb’s (SRL) behavior through participant-defined rules fosters a powerful sense of embodiment, effectively dissolving the boundary between user and device. This isn’t merely about acceptance of the SRL, but a deeper integration where it feels like a natural part of the body, responding intuitively to the user’s intentions. By granting individuals control over the SRL’s actions within specific zones, researchers observed a significant shift in perception – the device ceased to be viewed as a foreign object and began to function as a seamless extension of self, supported by physiological data indicating reduced arousal and increased comfort during interaction. This heightened sense of embodiment has implications beyond assistive technologies, potentially revolutionizing human-robot interaction across various domains by prioritizing user agency and intuitive control.
![Skin conductance responses reveal differing levels of arousal across interaction phases depending on autonomy, with significantly lower trust ratings observed under high-autonomy conditions [latex] (p < .05) [/latex].](https://arxiv.org/html/2602.00494v1/x6.png)
The study posits a nuanced understanding of spatial awareness, recognizing that comfort and control aren’t universally applied but are instead partitioned across the body. This echoes a principle of inherent systemic complexity; the researchers don’t seek to impose a single spatial rule, but rather to cultivate a responsive ecosystem of boundaries. As Carl Friedrich Gauss observed, “I would rather be lucky than right,” implying that adaptability and responsiveness-allowing the system to ‘find’ its equilibrium through user-defined zones-is preferable to rigid, pre-defined architectural solutions. The work acknowledges that belief in perfect spatial control is ultimately a denial of the entropy inherent in human-robot interaction; the system must grow around the user, not the other way around.
Future Coordinates
The establishment of spatial guidelines for supernumerary limbs, as demonstrated, isn’t a solution-it’s a deferral. It clarifies where control fractures, but not why fracture is inevitable. The research correctly identifies zones of tolerance, but tolerance isn’t acceptance. It is, at best, a temporary accommodation of the uncanny. The system will not remain static; user expectations, task demands, and the very sensation of embodiment are all drifting variables. Attempts to map a fixed ‘safe space’ around the body are predicated on the illusion of a stable self, an illusion which is, naturally, quite poor.
Future iterations should abandon the search for guarantees. A guarantee is merely a contract with probability. Instead, attention should focus on graceful degradation-how does the system fail predictably, and how can those failures be interpreted as informative feedback? Shared control isn’t about seamless integration, but about a legible negotiation of autonomy. The limb’s transgressions, its occasional missteps, are not bugs-they’re signals.
Ultimately, the question isn’t whether a supernumerary limb can be made ‘safe’, but whether its presence can be made meaningful. Stability is merely an illusion that caches well. The real challenge lies in cultivating a dynamic equilibrium, an acceptance that chaos isn’t failure-it’s nature’s syntax.
Original article: https://arxiv.org/pdf/2602.00494.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-02-03 18:12