Author: Denis Avetisyan
A new middleware architecture aims to unlock the full potential of robotic systems through enhanced communication and cloud integration.
Meta-ROS offers improved performance and reliability for real-time robotics applications, leveraging advancements in data distribution and communication protocols like Zenoh.
Despite advances in robotic systems, existing middleware frameworks often struggle with the demands of real-time performance, scalability, and ease of integration. This paper introduces Meta-ROS: A Next-Generation Middleware Architecture for Adaptive and Scalable Robotic Systems, a novel solution designed to overcome these limitations through optimized communication protocols like Zenoh and ZeroMQ. Our results demonstrate that Meta-ROS achieves up to 30% higher throughput and reduced latency compared to ROS2, while streamlining development and enhancing resource utilization. Will this new architecture pave the way for more robust and adaptable robotic AI applications in increasingly complex environments?
The Evolution of Robotic Communication
Early robotic systems benefited from pioneering middleware such as the Robot Navigation Framework and the Mobile Robot Programming Toolkit, yet these foundational tools presented inherent limitations as robotic complexity grew. These initial frameworks often employed monolithic architectures, meaning components were tightly coupled, hindering independent development and reuse. Consequently, scaling these systems – adding more robots, sensors, or functionalities – proved difficult and resource-intensive. The lack of modularity also made it challenging to adapt the software to new robotic platforms or tasks, requiring substantial code modification for even minor changes. This rigidity contrasted sharply with the increasing demand for flexible, adaptable robotic solutions capable of operating in dynamic and unpredictable environments, ultimately driving the need for more scalable and modular middleware solutions.
Early robotic systems often necessitated extensive custom integrations, a practice that quickly became a bottleneck as applications grew in complexity. Each new sensor, actuator, or algorithm frequently demanded unique code adaptations, hindering both development speed and system reliability. This bespoke approach lacked the standardized interfaces needed to readily combine components from different manufacturers or research groups. Consequently, scaling these systems to handle more sophisticated tasks-such as navigating dynamic environments or manipulating a wider variety of objects-proved exceedingly difficult and resource-intensive. The limitations of these early integrations ultimately underscored the need for more flexible and modular middleware solutions capable of accommodating the rapidly evolving demands of modern robotics.
ROS: A Foundation for Modern Robotics
The Robot Operating System (ROS) gained prominence as a flexible framework for robotics development due to its comprehensive suite of tools, libraries, and conventions. Initially released in 2007, ROS provides functionalities for hardware abstraction, low-level device control, message passing, package management, and visualization. This modular design enables developers to create, share, and reuse code components, accelerating the development of complex robotic systems. ROS supports a wide range of programming languages, including C++, Python, and Lisp, and operates on multiple platforms, including Linux, Windows, and macOS, fostering a broad and active developer community. The framework’s open-source nature and extensive documentation have further contributed to its widespread adoption in both academic research and commercial applications.
ROS 1, while successfully enabling the development of numerous robotic applications, exhibited inherent limitations that drove the creation of ROS 2. Specifically, the original architecture struggled to consistently meet the strict timing requirements of real-time control systems, hindering its use in safety-critical applications. Security vulnerabilities within the ROS 1 communication infrastructure also presented risks as robotic systems became more interconnected. Furthermore, scaling to multi-robot systems proved challenging due to the limitations of its master-based communication model, creating bottlenecks and single points of failure. These deficiencies in real-time performance, security, and scalability motivated a fundamental redesign resulting in ROS 2.
ROS 2 implemented the Data Distribution Service (DDS) as its core communication middleware to overcome limitations present in ROS 1. DDS is a machine-to-machine (M2M) connectivity standard for real-time systems, providing features such as quality of service (QoS) policies to guarantee message delivery reliability, latency bounds, and prioritization. This allows ROS 2 to support deterministic communication critical for real-time control applications and improve resilience against network disruptions. Furthermore, DDS natively supports publish-subscribe communication patterns and offers built-in discovery mechanisms, enabling scalable and flexible multi-robot systems without requiring centralized brokers or complex network configurations.
Meta-ROS: Lightweight Middleware for IoT Robotics
Meta-ROS builds upon the Robotics Operating System 2 (ROS 2) framework by prioritizing reduced communication overhead and efficient use of computational resources. This focus addresses the constraints common in Internet of Things (IoT) robotics deployments, where devices often have limited processing power, memory, and network bandwidth. By optimizing data serialization, transport protocols, and node scheduling, Meta-ROS aims to enable more complex robotic functionalities on resource-constrained hardware, and facilitate scalability in multi-robot systems operating within IoT environments. This approach contrasts with traditional ROS 2 deployments that may prioritize feature richness over resource efficiency, and allows for deployment on a wider range of edge devices.
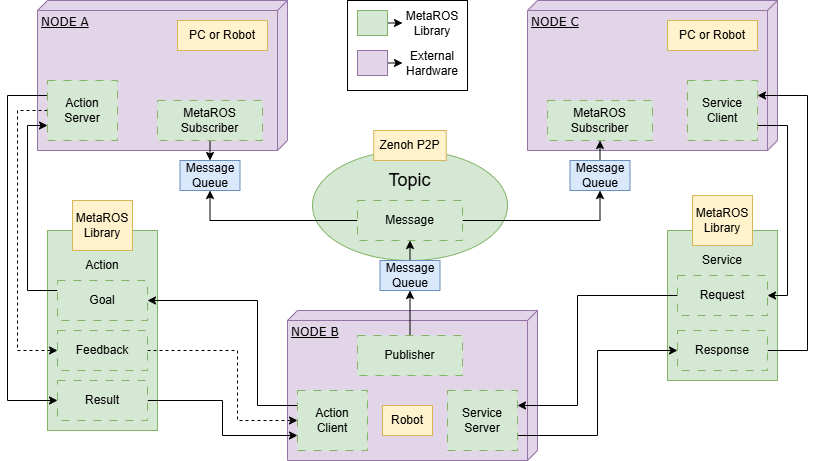
Meta-ROS utilizes established ROS communication paradigms – Topics, Services, and Actions – to facilitate interaction between robotic components. Data exchange primarily occurs through the Publisher-Subscriber model, where nodes publish data to named Topics and other nodes subscribe to those Topics to receive updates. Services provide a request-response communication mechanism for synchronous operations, while Actions enable long-running goals with feedback and cancellation capabilities. This combination of communication patterns allows for both real-time data streaming and reliable execution of complex robotic tasks, supporting a flexible and modular system architecture.
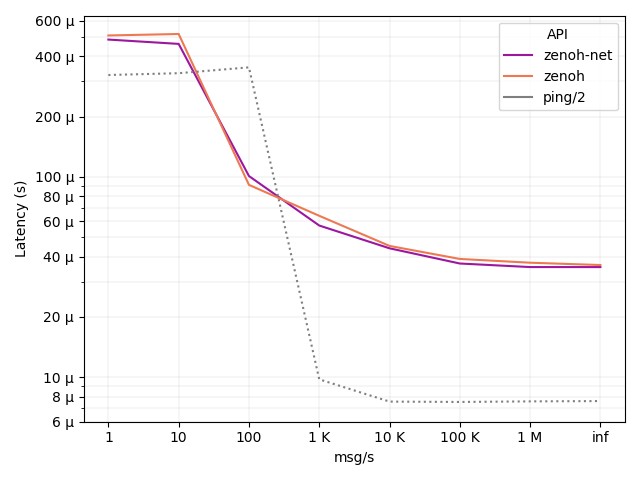
Zenoh functions as the core data distribution layer within Meta-ROS, facilitating communication between robotic devices and nodes. It employs a decentralized, peer-to-peer architecture supporting multiple communication patterns, including publish-subscribe, request-response, and key-value storage. This allows for flexible and efficient data exchange without reliance on a central broker. Zenoh’s implementation utilizes a binary, schema-aware protocol optimized for low-latency and high-throughput communication, enabling Meta-ROS to support bandwidth-constrained IoT robotics deployments and heterogeneous network environments. Furthermore, Zenoh supports data serialization formats like Protocol Buffers, Apache Avro, and JSON, ensuring interoperability between diverse robotic components.
Performance evaluations indicate that Meta-ROS achieves up to 30% higher throughput compared to ROS 2 in comparable robotics applications. This improvement stems from optimizations within the middleware layer, specifically regarding data serialization, transport, and scheduling. Benchmarking utilized standardized robotics workloads, including sensor data acquisition, command transmission, and actuator control loops, to quantify the throughput gains. The measured increase in throughput directly translates to improved responsiveness and real-time performance in robotic systems, particularly those operating within resource-constrained IoT environments. These results demonstrate a significant advancement in robotics middleware capabilities, enabling more complex and demanding applications.
The Completely Fair Scheduler (CFS) within Meta-ROS is implemented to prioritize CPU allocation, specifically benefiting non-critical robotic nodes. This scheduler dynamically adjusts CPU time slices based on node demand, ensuring equitable distribution and preventing resource monopolization. By allocating fewer resources to non-critical tasks and prioritizing essential processes – such as sensor data acquisition or motor control – CFS minimizes latency and improves the overall responsiveness of the robotic system. This optimization is particularly crucial in resource-constrained IoT environments where multiple nodes share limited computational resources, allowing Meta-ROS to maintain performance even with a high node density.
Cloud Robotics and the Expanding Horizon
Cloud Robotics fundamentally relies on effective middleware to bridge the gap between robotic hardware and remote cloud resources. Systems like Meta-ROS function as a critical enabling technology, facilitating seamless communication and data exchange between robots and the cloud for tasks exceeding onboard processing capabilities. This architecture allows robots to offload computationally intensive operations – such as complex image recognition, path planning, and machine learning – to the cloud, reducing hardware costs and power consumption. Furthermore, cloud storage provides robots with access to vast datasets and shared knowledge, enhancing their adaptability and collaborative potential. By abstracting the complexities of network communication and data management, middleware empowers roboticists to focus on higher-level functionalities and accelerate innovation in areas like autonomous navigation, human-robot interaction, and distributed robotic systems.
Beyond Meta-ROS, the landscape of robotic communication showcases a variety of middleware solutions each designed to tackle the unique challenges of interconnected systems. CORBA, a longstanding standard, offers a platform-independent communication framework, while ZeroMQ provides a high-performance asynchronous messaging library ideal for distributed robotics. More recently, Fawkes emerged as a lightweight and flexible option, prioritizing speed and ease of integration for resource-constrained robots. This diversity isn’t simply a matter of choice; each technology addresses specific needs, from legacy system compatibility and high-throughput data transfer to low-latency control and efficient resource utilization, highlighting the complex communication demands inherent in advanced robotics applications.
The future of robotics hinges not simply on increasingly sophisticated hardware, but on the software infrastructure that allows robots to communicate, collaborate, and learn-and robust, scalable middleware is central to this vision. As robotic systems become more complex and interconnected, demanding greater data processing and coordination, current communication architectures face significant challenges. Development efforts are therefore focused on middleware capable of handling massive data streams, ensuring reliable communication across diverse networks, and adapting to the dynamic nature of robotic tasks. Such advancements will enable the creation of truly intelligent, collaborative robotic ecosystems – from swarms of drones autonomously mapping disaster zones to interconnected manufacturing facilities where robots seamlessly share information and optimize production – ultimately unlocking a new era of automation and innovation across numerous industries.
The pursuit of Meta-ROS embodies a principle echoing through computational history. As Alan Turing observed, “This seems to me to be the essence of computation: to separate the logical steps from their physical embodiment.” This architecture, by abstracting communication and prioritizing lossless data distribution, directly addresses the entanglement of logical operation and physical limitation inherent in previous robotic middleware. Meta-ROS strives to achieve a clarity of function, shedding unnecessary complexity to facilitate a scalable and adaptive robotic system-a design philosophy that mirrors Turing’s emphasis on distilling computation to its essential form. The framework’s focus on optimized communication protocols isn’t merely technical advancement; it’s an exercise in achieving computational elegance through strategic deletion of overhead.
Where To Now?
The pursuit of robotic middleware, as demonstrated by Meta-ROS, inevitably circles back to a fundamental tension: abstraction versus immediacy. While layers of software promise flexibility and scalability, each addition introduces potential latency and points of failure. The question isn’t merely whether a system can connect disparate components, but whether it does so without obscuring the essential flow of information. Code should be as self-evident as gravity, and current solutions often fall short.
The promise of cloud integration, so central to Meta-ROS, demands a reckoning with the realities of network instability and security. Distributing robotic intelligence introduces complexities that cannot be solved by simply moving computation ‘to the cloud.’ True progress requires rethinking data distribution-not just faster pipes, but intelligent filtering and prioritization. The field must confront the fact that bandwidth is a finite resource, and every byte transmitted incurs a cost, both in time and energy.
Ultimately, the success of any middleware framework rests not on its feature list, but on its ability to fade into the background. Intuition is the best compiler; developers should focus on behavior, not on the plumbing that enables it. The next generation of robotic systems will be defined not by what middleware does, but by what it doesn’t require the user to think about.
Original article: https://arxiv.org/pdf/2601.21011.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
2026-01-30 12:26