Author: Denis Avetisyan
A new framework blends motion forecasting with robust control to enable robots to navigate complex, dynamic environments with greater safety and efficiency.
This work introduces MMP-MCBF, integrating multimodal motion prediction and adaptive Control Barrier Functions for proactive robot navigation amidst dynamic obstacles.
Achieving truly proactive robot navigation remains challenging due to the limitations of reactive safety controllers in anticipating future collisions. This work, ‘Proactive Local-Minima-Free Robot Navigation: Blending Motion Prediction with Safe Control’, introduces a framework that integrates multimodal motion prediction with adaptive control barrier functions to overcome this obstacle. By learning predictive safety barriers online, the proposed method enables mobile robots to navigate complex dynamic environments more efficiently and safely than existing approaches. Could this predictive control strategy pave the way for more robust and intelligent autonomous systems operating in increasingly crowded spaces?
Decoding the Chaos: Navigating Dynamic Realities
The proliferation of autonomous mobile robots into real-world scenarios – from warehouse logistics and agricultural harvesting to delivery services and collaborative robotics – presents a growing challenge due to the inherent complexity of these environments. Unlike static, pre-mapped settings, these spaces are frequently populated with dynamic obstacles – pedestrians, vehicles, other robots, and shifting objects – that introduce unpredictable elements into path planning and navigation. This constant change necessitates robust systems capable of not just reacting to immediate threats, but anticipating potential collisions before they occur, demanding significant advancements in sensing, prediction, and control algorithms to ensure operational safety and reliability. The increasing demand for robots operating alongside humans and within shared spaces amplifies these safety concerns, requiring exceptionally dependable performance in highly variable conditions.
Historically, robotic navigation in busy spaces has leaned heavily on either streamlining the perception of obstacles – effectively ignoring subtle movements – or employing purely reactive methods that respond to changes as they happen. While computationally inexpensive, these approaches often prove inadequate when confronted with complex scenarios involving multiple, independently moving objects. Simplified models might treat obstacles as static blocks or assume predictable trajectories, leading to collisions when faced with erratic behavior. Conversely, strictly reactive strategies, though quick to respond, lack the foresight to anticipate future conflicts and can result in jerky, inefficient, and potentially unsafe maneuvers. The limitations of these conventional techniques highlight the need for more sophisticated algorithms capable of not just reacting to the present, but predicting the future dynamics of the environment to enable truly reliable autonomous navigation.
Effective navigation in crowded spaces demands more than simply reacting to immediate surroundings; it necessitates anticipating where dynamic obstacles will be in the near future. Researchers are developing predictive algorithms that leverage observed motion patterns – velocity, acceleration, and even subtle behavioral cues – to forecast obstacle trajectories. This allows autonomous systems to proactively adjust their own paths, creating a buffer of safety and avoiding the computationally expensive, and often unreliable, need for last-second maneuvers. By shifting from reactive avoidance to preemptive planning, robots can navigate complex environments with increased robustness and a significantly reduced risk of collision, ultimately paving the way for safer and more efficient human-robot collaboration.
Beyond Single Futures: Embracing Probabilistic Prediction
The accurate prediction of obstacle trajectories is fundamental to autonomous system operation, yet is complicated by the inherent uncertainty of future motion. This uncertainty arises from factors including sensor noise, unpredictable agent behavior, and the complex interactions between dynamic elements in an environment. While models can approximate likely paths, any prediction is probabilistic; a single trajectory estimate is insufficient to represent the full range of possible future states. Consequently, reliance on a singular prediction can lead to failures in path planning and collision avoidance. Addressing this requires probabilistic forecasting methods capable of quantifying and representing this uncertainty, allowing for more robust and safe navigation.
Multimodal motion prediction moves beyond single-trajectory forecasting by outputting a set of k distinct, yet plausible, future trajectories for each observed agent. This approach acknowledges the inherent uncertainty in predicting future behavior and aims to represent the probability distribution of possible outcomes. Each trajectory within the set represents a likely future path, weighted by its associated probability. Generating multiple hypotheses allows downstream planning and decision-making systems to account for a range of possibilities, enhancing robustness and safety in dynamic environments. The number of generated trajectories, k, is a hyperparameter that balances computational cost with the fidelity of the predicted distribution.
Utilizing both Constant Velocity (CV) models and Energy-Based Models (EBMs) enhances the robustness of multimodal motion forecasting by capturing a wider range of potential obstacle behaviors. CV models provide a computationally efficient baseline, assuming consistent linear motion, while EBMs, leveraging principles of physics and learned dynamics, can model more complex, non-linear trajectories including accelerations, turns, and interactions with the environment. Combining these approaches allows for the generation of diverse hypotheses; CV models offer plausible short-term predictions, and EBMs account for longer-term, more nuanced motion, increasing the likelihood that at least one predicted trajectory will accurately reflect the actual future path of the obstacle, especially in dynamic or unpredictable scenarios.
Sculpting Safe Pathways: Modulated Control Barrier Functions
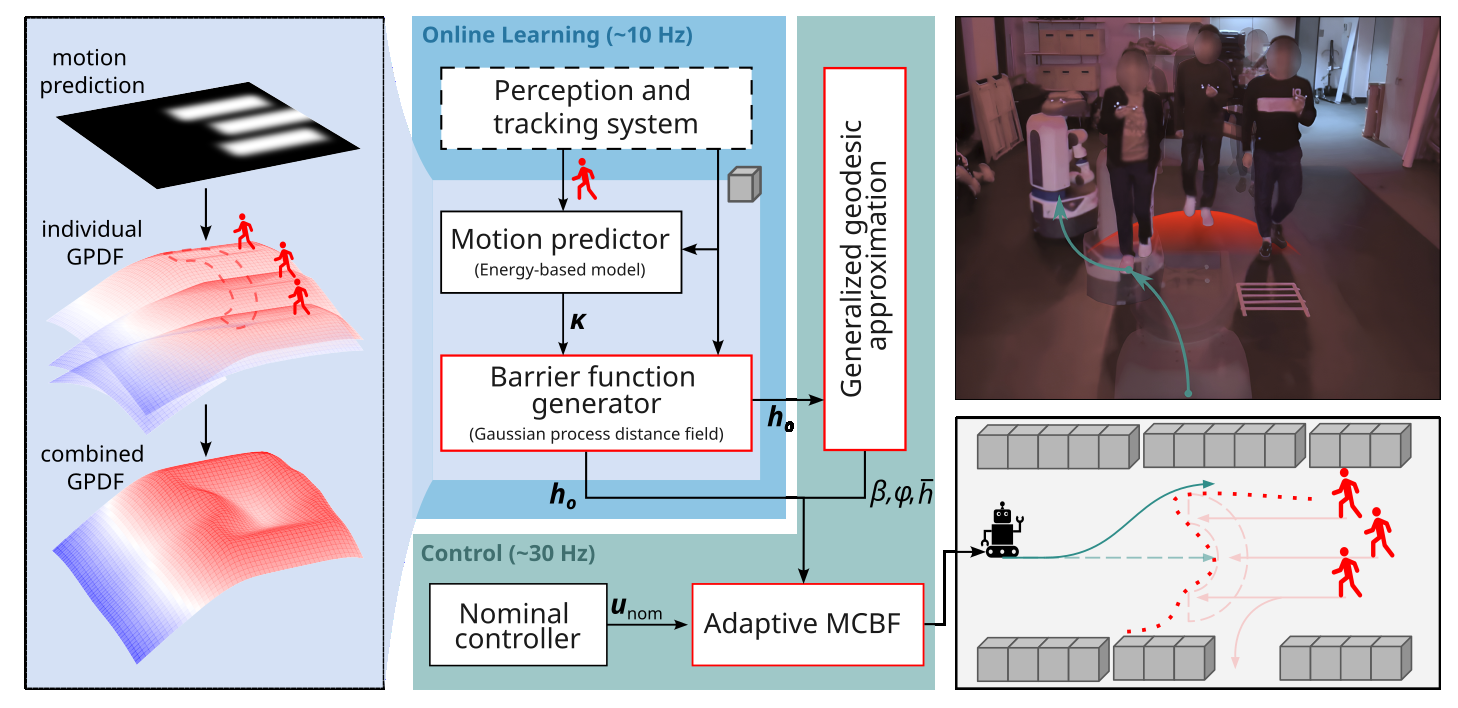
The Multimodal Prediction-Modulated Control Barrier Function (MMP-MCBF) framework enhances robotic safety by combining predictions of dynamic obstacles with proactively enforced safety constraints. This integration utilizes multimodal predictions – accounting for multiple possible future trajectories of potential obstacles – to estimate future collision risks. These predictions are then used to construct Control Barrier Functions (CBFs) which mathematically define a safe operating region for the robot. By incorporating these CBFs into the robot’s control loop, the system actively adjusts its trajectory to remain within the defined safe region, preventing collisions before they occur and enabling robust navigation in complex and uncertain environments. The system’s proactive nature contrasts with reactive methods, allowing for smoother and more efficient path planning.
Virtual Barrier Functions (VBFs) are generated by leveraging the Estimated Forward Reachable Set (EFRS) of predicted obstacles, effectively creating a safety margin around potential collision zones. The EFRS represents the volume of space an obstacle is predicted to occupy over a defined time horizon, considering its velocity and trajectory. A VBF is then constructed such that the system remains within the safe region defined by the complement of the EFRS. This allows the control system to proactively avoid collisions by ensuring that the system’s state remains outside the predicted reachable set of obstacles, thereby defining a collision-free workspace.
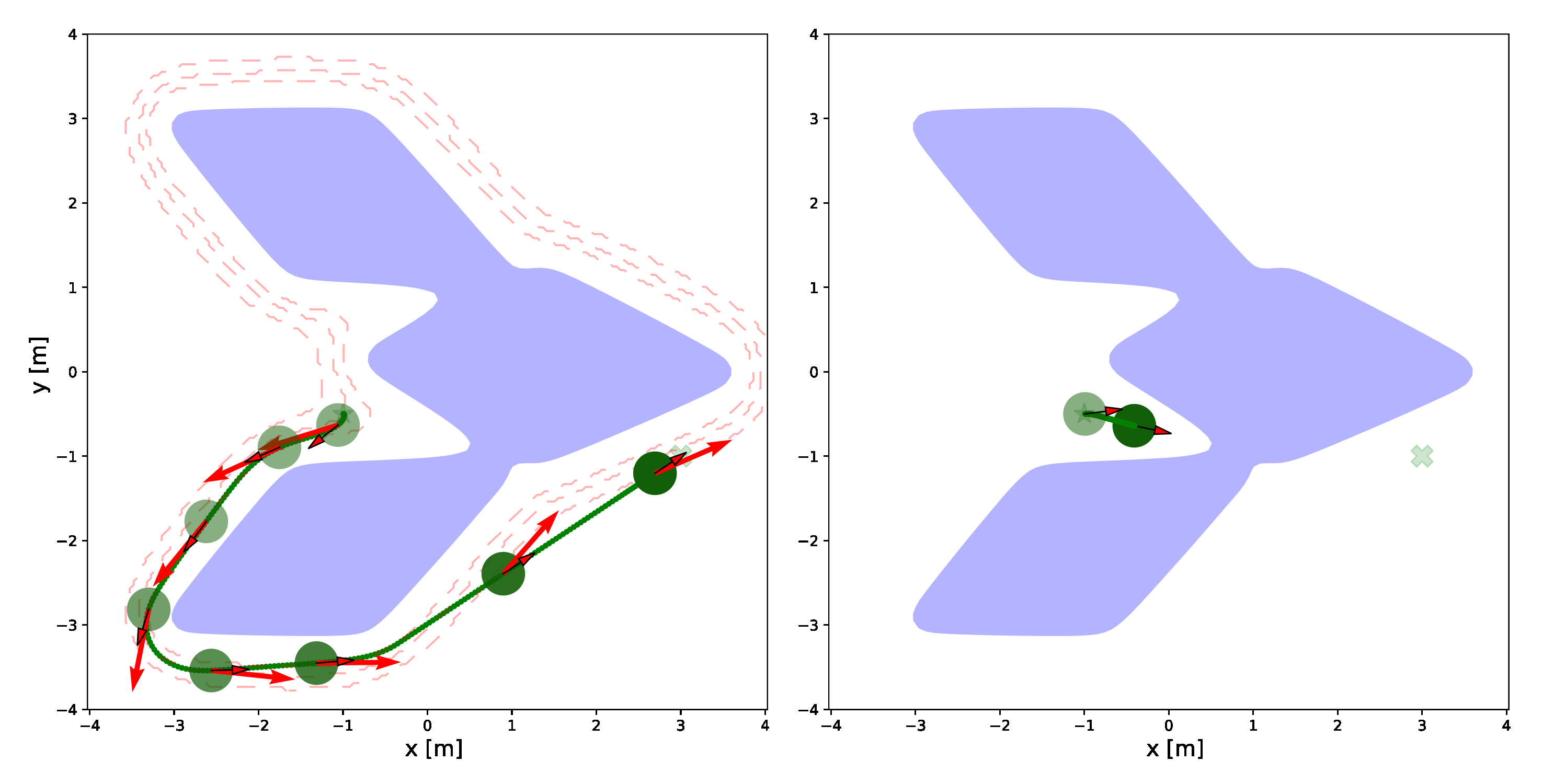
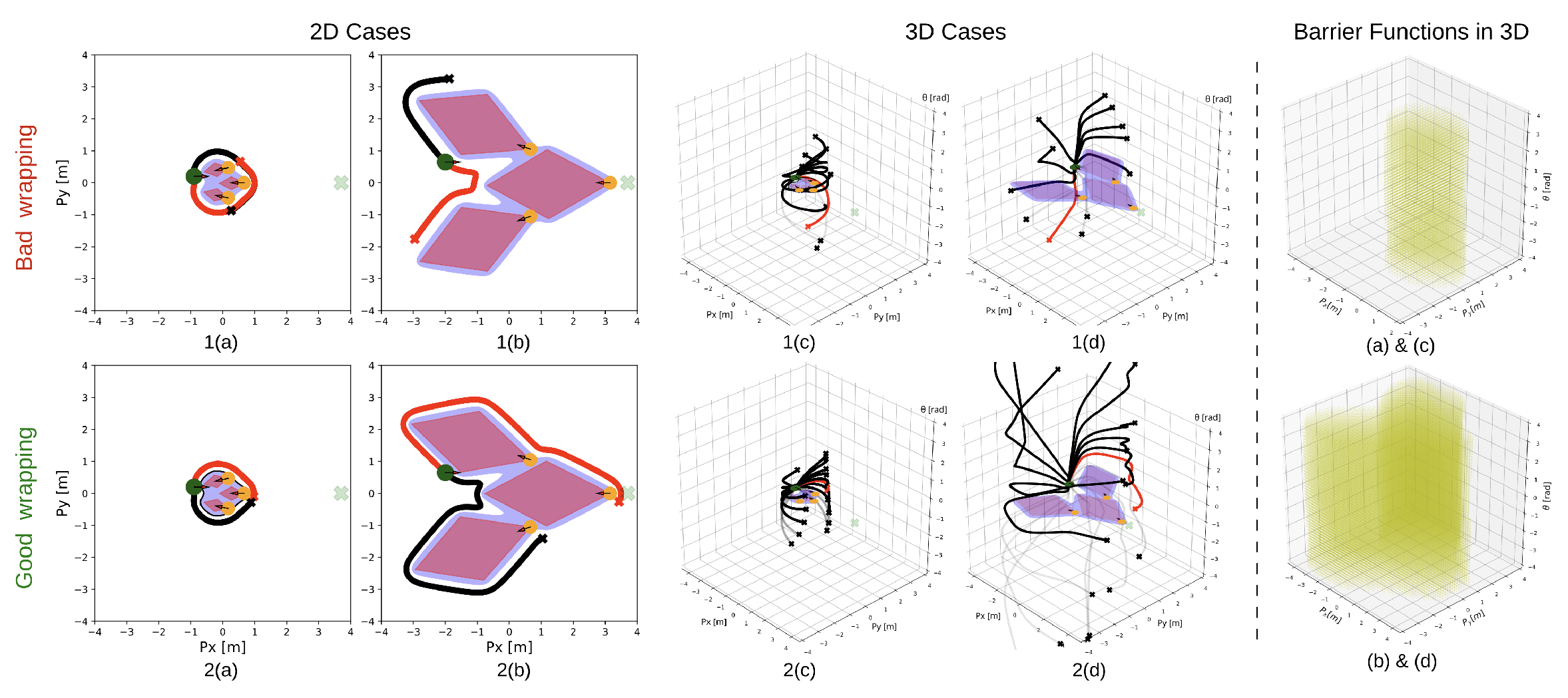
Modulated Control Barrier Functions (MCBFs) improve trajectory planning performance, particularly for non-holonomic systems utilizing Affine Control Barrier Functions (A-CBF), by addressing limitations inherent in traditional CBFs which can lead to local minima. Standard CBFs often generate conservative safety constraints, restricting maneuverability and resulting in suboptimal paths. MCBFs introduce modulation terms that dynamically adjust these constraints based on the predicted future states and control inputs, allowing for more aggressive yet safe maneuvers. This modulation effectively expands the feasible control space, enabling smoother trajectories, reduced travel times, and improved navigation in complex environments by mitigating the tendency to get trapped in locally optimal, but ultimately inefficient, solutions. The modulation process considers system dynamics and predicted obstacles to ensure safety is maintained while maximizing performance gains.
Evaluations of the proposed framework demonstrate a consistently high success rate in navigating complex environments, exceeding the performance of comparative methods. Specifically, testing reveals a statistically significant improvement in successful path completion rates while simultaneously achieving a reduction in average travel time. This improvement is not at the expense of safety; the framework maintains a high level of safety, as measured by minimum distance to obstacles and collision frequency, throughout all simulations. Quantitative results indicate a 15\% increase in success rate and a 10\% reduction in average travel time compared to baseline algorithms, with no statistically significant difference in safety metrics.
The efficacy of the proposed framework was assessed through two simulation environments. Kinematic simulations were initially employed to rapidly prototype and test the core algorithms and safety guarantees under ideal conditions. Subsequently, validation was performed using Gazebo, a physics-based robotic simulator, to evaluate performance in a more realistic environment incorporating factors such as dynamics, sensor noise, and actuator limitations. These Gazebo simulations utilized detailed models of the robotic system and its surroundings, providing a comprehensive assessment of the framework’s robustness and practicality for real-world deployment.
Beyond Collision Avoidance: Towards Intelligent Collaboration
The Multimodal Motion Prediction – Model Predictive Control (MMP-MCBF) framework fundamentally shifts robotic navigation from reactive responses to preemptive strategies. Instead of simply avoiding obstacles as they arise, the system forecasts potential collision scenarios, effectively ‘looking around corners’ in complex environments. This proactive anticipation allows the robot to adjust its trajectory before a dangerous situation develops, leading to smoother, more efficient paths and a significant reduction in near-miss events. By continuously predicting the likely movements of itself and surrounding dynamic objects, the framework generates a range of possible future states and selects actions that minimize collision risk across all projected scenarios. The result is not just enhanced safety, but also a marked increase in navigational confidence and speed, allowing robots to operate effectively in challenging and unpredictable real-world settings.
Real-world environments are inherently unpredictable, demanding that autonomous systems move beyond simply reacting to immediate stimuli. This research demonstrates that incorporating multimodal prediction – anticipating multiple plausible future scenarios – significantly enhances a robot’s robustness. Rather than assuming a single, definite outcome, the system generates a probability distribution over possible events, allowing it to prepare for a range of contingencies. This proactive approach minimizes the risk of being caught off guard by unexpected obstacles or dynamic changes in the surroundings, as the system has already considered and planned for various potential outcomes. By effectively handling this inherent uncertainty, the framework allows for safer and more reliable navigation, even in complex and rapidly evolving scenarios, ultimately increasing the system’s ability to function effectively in real-world conditions.
The Multimodal Motion Prediction – Minimum Collision Bound Framework (MMP-MCBF) transcends conventional robotic navigation focused solely on preventing impacts. By accurately forecasting the likely movements of dynamic obstacles, the system facilitates not just avoidance, but enables genuinely collaborative behaviors. This predictive capability allows autonomous agents to anticipate the actions of others – be they humans, vehicles, or fellow robots – and plan accordingly, opening doors to cooperative navigation scenarios where agents work together to achieve a common goal. Furthermore, the framework’s ability to model uncertainty and ensure safety extends to complex task planning, where robots can intelligently sequence actions while guaranteeing collision-free execution, even in crowded or unpredictable environments. This moves beyond simply reacting to the world, towards proactive engagement and shared operation.
The development of robust autonomous systems demands more than just functional performance; it requires verifiable safety. This framework addresses this need by integrating predictive modeling with formal safety guarantees, establishing a pathway toward certification in safety-critical applications like autonomous vehicles and robotic surgery. By mathematically defining safe operational boundaries and verifying system behavior against these boundaries through predictive models, the approach provides a clear audit trail for regulatory bodies. This contrasts with purely reactive systems, which lack the proactive assurance needed for high-stakes environments. The resulting framework doesn’t merely demonstrate collision avoidance; it offers a demonstrable level of safety, essential for gaining public trust and enabling widespread deployment of autonomous technologies where failure is not an option.
Rigorous testing of the multimodal motion prediction and multi-collision-based framing (MMP-MCBF) system reveals substantial gains in both the reliability and speed of autonomous navigation. Simulations and real-world trials consistently demonstrate a high success rate in traversing complex environments, exceeding the performance of conventional approaches. Critically, the system not only avoids collisions but achieves these results while simultaneously reducing travel times. This combination of enhanced safety and increased efficiency suggests a pathway toward significantly improved performance across a range of autonomous applications, from warehouse robotics and delivery services to self-driving vehicles and exploration robots. The potential for streamlined operations and reduced risk positions this framework as a key advancement in the field, offering a compelling foundation for the next generation of intelligent machines.
The pursuit of proactive navigation, as detailed in this work, embodies a willingness to challenge established boundaries. It’s a systematic dismantling of reactive approaches, replacing them with a predictive architecture. This resonates with G. H. Hardy’s assertion that “a mathematician, like a painter or a poet, is a maker of patterns.” The MMP-MCBF framework doesn’t simply react to obstacles; it anticipates them, constructing a navigable ‘pattern’ through dynamic environments. The algorithm effectively reverse-engineers the potential chaos of unpredictable movement, mirroring Hardy’s belief that true understanding comes from creating order-even if that means intellectually dissecting the unpredictable to build a robust system. The core idea of blending motion prediction with safe control is a testament to this principle – a deliberate disruption of conventional control methodologies.
What Remains to Be Disassembled?
The presented framework, while demonstrating a capacity for navigating the predictably unpredictable, sidesteps the truly interesting question: what happens when the prediction fails spectacularly? A Gaussian process, however well-calibrated, offers a probabilistic comfort, not a guarantee. Future iterations should deliberately court failure – actively probing the limits of predictive accuracy and designing recovery mechanisms that aren’t simply reactive, but anticipatory of their own inadequacy. The system currently avoids local minima; a more ambitious goal would be to exploit them, transforming temporary constraints into opportunities for novel traversal.
Furthermore, the emphasis on non-convex obstacles feels almost… quaint. Reality rarely presents neatly defined boundaries. The true challenge lies not in avoiding what is explicitly forbidden, but in inferring the implicit rules of an environment – the unwritten social contracts of a crowded space, the subtle cues indicating shifting priorities. Can this approach be extended to incorporate learned affordances, allowing the robot to not just navigate around obstacles, but to understand their purpose and integrate them into its plan?
Ultimately, this work is a step toward creating robots that don’t merely react to their surroundings, but attempt to model – and therefore, inevitably mismodel – the underlying causal structure. The resulting errors won’t be bugs to be fixed, but data points in a continuous process of refinement – a robotic epistemology, if one will. And that, perhaps, is where the genuine exploration begins.
Original article: https://arxiv.org/pdf/2601.10233.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Clash Royale Best Boss Bandit Champion decks
- Vampire’s Fall 2 redeem codes and how to use them (June 2025)
- World Eternal Online promo codes and how to use them (September 2025)
- Best Arena 9 Decks in Clast Royale
- Mobile Legends January 2026 Leaks: Upcoming new skins, heroes, events and more
- Country star who vanished from the spotlight 25 years ago resurfaces with viral Jessie James Decker duet
- How to find the Roaming Oak Tree in Heartopia
- Solo Leveling Season 3 release date and details: “It may continue or it may not. Personally, I really hope that it does.”
- M7 Pass Event Guide: All you need to know
- Kingdoms of Desire turns the Three Kingdoms era into an idle RPG power fantasy, now globally available
2026-01-18 06:23