Author: Denis Avetisyan
A new hierarchical co-design integrates bio-inspired control and optimized networking to unlock scalable, robust behavior in large UAV swarms.
This review details the Bio-inspired Integrated Networking and Control (BINC) scheme, a framework for achieving low-latency communication and high maneuverability in multi-UAV systems.
Scaling unmanned aerial vehicle (UAV) swarms presents a fundamental challenge: balancing the demands of robust formation control with the communication overhead of network management. This paper introduces the Bio-inspired Integrated Networking and Control for Large-Scale Swarm: A Hierarchical Co-design scheme (BINC), a novel hierarchical architecture that leverages bio-inspired algorithms to minimize communication while maximizing maneuverability. BINC achieves this through a fused networking and control approach, employing localized topologies and algorithms inspired by avian flocking behavior. Could this integrated design pave the way for truly scalable and adaptable swarm robotics in complex, real-world scenarios?
The Challenge of Scalable Swarm Control
The deployment of substantial unmanned aerial vehicle (UAV) swarms introduces considerable hurdles in both networking and control, stemming from inherent limitations in bandwidth and computational power. As the number of UAVs increases, the demand on communication channels grows exponentially, quickly exceeding the capacity of available wireless infrastructure. Each UAV possesses finite onboard processing capabilities, restricting its ability to independently calculate complex trajectories, maintain situational awareness, and coordinate effectively with its neighbors. This constraint necessitates distributed algorithms that minimize individual computational load, but these algorithms must also contend with the challenges of unreliable communication links and potential message loss. Consequently, researchers are actively investigating techniques like data compression, prioritized messaging, and edge computing to alleviate these bottlenecks and enable truly scalable swarm operations, all while striving for robust and resilient control in dynamic environments.
Conventional routing protocols, such as the Optimized Link State Routing (OLSR) protocol, face considerable limitations when applied to the rapidly changing network topologies characteristic of Mobile Ad-hoc Networks (MANETs) utilized by Unmanned Aerial Vehicle (UAV) swarms. These protocols, designed for more static environments, struggle to efficiently adapt to frequent node movements and link failures, leading to increased control overhead-the amount of data dedicated to maintaining network connectivity rather than useful payload transmission. Studies demonstrate that OLSR, in dynamic swarm scenarios, generates significantly more routing messages compared to contemporary, more adaptive approaches like swarm intelligence-based routing or localized flooding techniques. This heightened overhead consumes valuable bandwidth and computational resources, hindering scalability and potentially impacting the swarm’s ability to maintain consistent communication and coordinated flight, particularly as the number of UAVs increases.
As unmanned aerial vehicle (UAV) swarms expand in size, the challenge of maintaining precise formation control intensifies dramatically. Each additional agent introduces increased computational demands and communication complexities, quickly overwhelming centralized control architectures. Traditional methods, reliant on frequent global broadcasts of position and velocity data, become impractical due to bandwidth limitations and potential collisions. Consequently, research is pivoting towards decentralized approaches, where each UAV coordinates locally with its immediate neighbors, relying on algorithms like consensus-based control and bio-inspired flocking behaviors. These innovative methods aim to distribute the computational burden, reduce communication overhead, and enhance the swarm’s robustness against individual agent failures, ultimately enabling highly coordinated maneuvers even within large-scale deployments. The efficacy of these decentralized strategies is often evaluated through simulations and physical experiments, assessing metrics like formation fidelity, stability, and resilience to disturbances.

Bio-Inspired Networking: A Pathway to Scalability
The Bio-inspired Integrated Networking and Control (BINC) scheme utilizes a hierarchical clustering methodology to address scalability limitations and reduce routing overhead in mobile ad-hoc networks. This approach organizes network nodes into clusters, minimizing the scope of routing updates and control message propagation. Comparative analysis demonstrates that BINC achieves an 85.2% reduction in routing overhead when benchmarked against the Optimized Link State Routing (OLSR) protocol. This reduction is a direct result of localized routing within clusters and streamlined inter-cluster communication, leading to improved network efficiency and reduced bandwidth consumption.
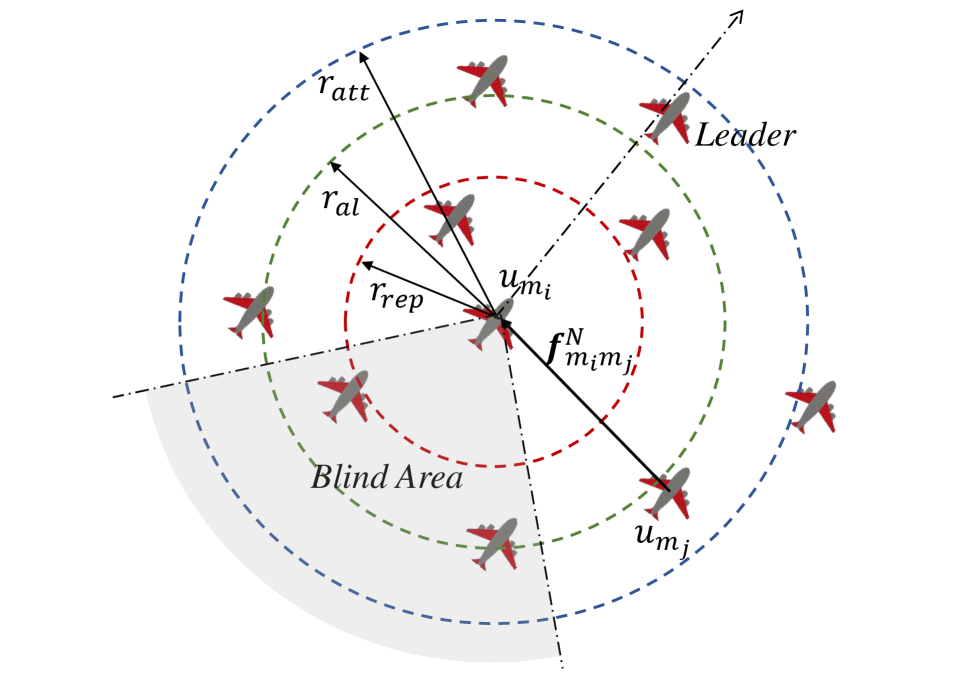
The Bio-inspired Integrated Networking and Control (BINC) scheme models network behavior after flocking animals to optimize routing. Specifically, BINC utilizes a Pigeon-inspired Algorithm to govern the formation of clusters within the network; this algorithm focuses on localized, direct communication for efficient intra-cluster connectivity. Inter-cluster coordination and obstacle avoidance are managed by a Starling-inspired Algorithm, which prioritizes broader awareness of the network topology and dynamic adjustments to routing paths based on perceived obstructions or changes in network conditions. This dual-algorithm approach allows BINC to balance localized efficiency with global adaptability, contributing to its reduced routing overhead and improved scalability.
The BINC scheme utilizes a two-hop neighbor range to facilitate cluster formation and maintenance, allowing nodes to discover and communicate with neighbors beyond immediate transmission range. This range is critical for establishing connectivity and disseminating control information. Two specialized message types support this process: the C-HELLO message, used for neighbor discovery and initial cluster association within the two-hop range, and the CMN (Cluster Maintenance Notification) message, which is periodically broadcast to maintain cluster membership and update neighbor information. The two-hop range and these messages collectively reduce the frequency of full network-wide broadcasts required for routing updates, contributing to the observed reduction in routing overhead.

Empirical Validation of BINC Performance
BINC’s performance in simulated environments consistently demonstrates its capability to maintain cluster cohesion while optimizing communication demands. Testing indicates that BINC effectively manages inter-agent relationships, preventing cluster fragmentation and ensuring agents remain within defined group boundaries throughout the simulation. This stability is achieved through a distributed consensus mechanism, minimizing the frequency and volume of communication required between agents to coordinate movement. By reducing unnecessary messaging, BINC decreases computational load and improves scalability, enabling the simulation of larger agent populations without significant performance degradation. The algorithm’s design prioritizes local interactions and minimizes reliance on global state information, further contributing to reduced communication overhead and improved robustness in dynamic environments.
The Starling-inspired algorithm, implemented within the BINC framework, demonstrably enhances both inter-cluster formation and obstacle avoidance capabilities. Comparative analysis against the established Boids algorithm reveals a 6.36% improvement in the obstacle avoidance radius. This increase signifies a greater margin of safety and improved navigational performance for individual agents within the simulated environment. The algorithm achieves this through a modified repulsion function and localized perception, enabling quicker reactions to potential collisions and more effective cluster cohesion during maneuvers.
Control convergence within the BINC system was quantitatively assessed using Velocity Variance as a primary metric. Results indicate a 21.6% reduction in velocity variance when compared to the standard Boids algorithm, signifying tighter flocking and more coordinated movement. This reduction in variance correlates directly with faster convergence times; the BINC system consistently achieved stable cluster formations and maintained cohesive movement more rapidly than the baseline Boids implementation. These findings were established through rigorous simulation and statistical analysis of agent velocities over defined time intervals, providing empirical evidence of improved control performance.

Robustness and the Promise of Future Applications
The Bio-inspired Network Communication (BINC) system is engineered for sustained functionality through a proactive approach to network maintenance. Rather than reacting to failures, BINC utilizes continuous adjustments to cluster formations and vigilant neighbor monitoring to preemptively address potential disruptions. This dynamic reconfiguration allows the network to adapt to changing conditions, such as node movement or signal interference, without significant performance degradation. By constantly assessing the health and connectivity of neighboring nodes and refining cluster assignments, BINC ensures that communication pathways remain robust and resilient, minimizing downtime and maximizing overall network stability even in challenging environments.
Within the broader Bio-inspired Networking and Computing (BINC) framework, the implementation of a novel Clustering-based Link State Routing (CLSR) protocol dramatically improves network efficiency and resilience. This refined routing approach organizes network nodes into dynamic clusters, streamlining data transmission and reducing the computational burden associated with traditional link state routing. Rigorous testing has demonstrated a substantial 70.5% reduction in routing overhead when compared to conventional CLSR implementations, signifying a considerable decrease in both energy consumption and network congestion. By minimizing the frequency and scale of routing updates, the protocol not only extends network lifespan but also enhances its ability to adapt to changing topologies and maintain stable communication pathways, paving the way for robust, scalable swarm networking.
The architecture exhibits considerable promise beyond theoretical performance, offering practical applications across diverse fields. Simulations involving up to 1000 nodes have confirmed the system’s scalability, suggesting its viability for deployment in large-scale scenarios like search and rescue operations where maintaining connectivity across a wide area is crucial. Similarly, precision agriculture benefits from the reliable data relay facilitated by the network, enabling detailed environmental monitoring and optimized resource allocation. Furthermore, the system is well-suited for large-scale environmental monitoring initiatives, providing a robust infrastructure for collecting and disseminating data from geographically dispersed sensor networks. These successful simulations demonstrate a pathway toward real-world implementation and highlight the system’s adaptability to complex, dynamic environments.

The pursuit of scalable control in multi-agent systems, as demonstrated by the Bio-inspired Integrated Networking and Control (BINC) scheme, necessitates a reduction of complexity. This aligns with the sentiment expressed by David Hilbert: “We must be able to answer the question: what are the ultimate elementary concepts?” The BINC architecture, through its hierarchical approach to networking and control, actively addresses this challenge. By decomposing the swarm’s operational requirements into manageable layers, the system minimizes communication overhead and maximizes maneuverability – effectively distilling a complex problem into fundamental, addressable components. The emphasis on efficient routing optimization and collision avoidance, core tenets of the design, exemplifies a commitment to conceptual purity, mirroring Hilbert’s drive toward foundational understanding.
Beyond the Swarm
The presented scheme, while demonstrating a pathway toward scalable swarm control, merely addresses the initial contours of a far more complex problem. True integration of networking and control is not a matter of layering – of appending communication to pre-existing directives – but of recognizing communication as control. The hierarchy proposed, while efficient, risks becoming a bottleneck, a single point of failure in a system predicated on robustness. Future work must confront the inherent tension between centralized coordination and decentralized resilience.
The current emphasis on bio-inspiration, particularly the replication of observed behaviors, often obscures the underlying principles. Mimicry, without understanding, yields brittle systems. A deeper investigation into the informational basis of swarm intelligence – how limited agents extract meaningful signals from noise – is paramount. Reducing communication overhead is not simply about minimizing bandwidth; it is about maximizing information density.
Ultimately, the challenge lies not in building larger swarms, but in building simpler swarms. The pursuit of ever-increasing complexity is a distraction. The truly elegant solution will not be found by adding more layers, but by revealing the essential logic already present within the system itself. The goal is not to control the swarm, but to allow it to self-organize, guided by the fewest necessary constraints.
Original article: https://arxiv.org/pdf/2511.16067.pdf
Contact the author: https://www.linkedin.com/in/avetisyan/
See also:
- Clash Royale Best Boss Bandit Champion decks
- Vampire’s Fall 2 redeem codes and how to use them (June 2025)
- Mobile Legends January 2026 Leaks: Upcoming new skins, heroes, events and more
- World Eternal Online promo codes and how to use them (September 2025)
- Clash Royale Season 79 “Fire and Ice” January 2026 Update and Balance Changes
- Best Arena 9 Decks in Clast Royale
- M7 Pass Event Guide: All you need to know
- Clash Royale Furnace Evolution best decks guide
- Best Hero Card Decks in Clash Royale
- Clash Royale Witch Evolution best decks guide
2025-11-24 01:35